
LiDAR SLAM 手持式3D掃描儀 點雲入門快速指南
手持式3D掃描儀生成的數據採用獨特的格式-稱為點雲。
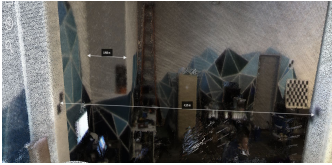
為了快速說明,這裡有一個點雲的截圖由LiDAR SLAM生成

什麼是點雲?
簡單的解釋是,它是真實世界空間維度的數位記錄。它之所以被稱為點雲,是因為它由數百萬個點組成,每個點都是三維掃描儀捕捉到的現有條件的精確尺寸量測。
常見Q&A
如何導航點雲?
這取決於您使用的軟件應用程序,但實際上所有點雲查看應用程序都允許使用多種方法。例如,我們自己的Retrace軟件提供了使用鍵盤和滑鼠在點雲中導航的功能,就像您探索視頻遊戲環境一樣。該程式還允許您使用整個掃描的開銷“迷你地圖”、捕獲掃描時所走的路徑以及PX-80在掃描過程中自動捕獲的球形照片來探索數據。最後,可以在PX-80捕獲階段添加注釋以標記感興趣的點,然後使用這些注釋快速導航到數據集中的正確位置。
許多應用程序都包含一些工具,可以幫助您在數據集中找到所需的位置,並僅在必要時打開點雲。
如何從點雲獲取測量值?
在大多數應用程序中,此任務非常簡單,只需導航到需要檢查的點雲部分,按一下側欄中的量測工具,然後在兩點之間拖動一條線即可獲得測量值。一些工具還包括一個用於量測體積的類似工具。以下是Retrace的截圖:
可以轉換點雲視角嗎?
由於點雲是完全三維格式,無論使用什麼工具捕捉它,都可以從任何角度查看。您可以使用掌上型3D掃描儀徒步捕獲點雲,然後自上而下查看,就像您從無人機上看到掃描的環境一樣。實際上,您可以從所需的任何角度查看點雲的任何部分,包括對象和房間。
如果手持式掃描儀在執行這些測量時在空間中移動,並在移動過程中從不同角度反復捕獲物體,那麼最終的點雲是如何不淩亂的呢?
這就是SLAM技術(同時定位和映射)的功能。該演算法將雷射雷達數據與其他感測器的數據進行融合,以確保量測點在空間中正確對齊。
點雲中的顏色來自何處?
SLAM演算法實現了另一個技巧:自動將LiDAR 點數據與相機捕獲的RGB數據融合,生成彩色點雲。當你觀察一個房間的彩色點雲時,你看到的是該房間的尺寸測量值和該房間在掃描儀量測的每個點上的RGB值。
其效果是,這種彩色化使點雲看起來更像一張3D照片,這有助於用戶(新用戶和有經驗的用戶)更快地瞭解他們所看到的。
如何把不同的點雲放在一起?
手持式3D掃描儀的效率足以在一次掃描中捕獲許多空間。然而,更大的項目將需要更多的掃描以獲得完整的覆蓋範圍,這意味著您將需要將多個點雲合併為整個資產的最終點雲。各種軟件應用程序使您能夠做到這一點,但是,每個應用程序對這項任務的處理管道不同,所以您選擇的軟件和方法將取決於您的最終應用程序。
點雲的應用層面?
- 樓層平面圖
從點雲中選取一個二維切片,直接在上面繪製二維CAD平面圖。這提供了一個非常快速,尺寸精確的最終產品完美的應用,如空間規劃和管理。
- 三維BIM
如果需要高細節級別的三維BIM,可以將同一點雲拉入BIM應用程序(如Revit)並在其上建立模型。您甚至可以將數據拉到一個智慧的、半自動的三維建模應用程序(如PointFuse)中,並在幾個小時內為您的資產生成一個精確的三維模型。
- 地形量測
如果在捕獲過程中在室內和室外使用手持掃描儀,則只需從點雲中删除建築數據,並顯示資產周圍區域的詳細地形資訊。
- 竣工模型和進度跟踪
只有在構建的資產與設計模型完全匹配時,設計模型才是一個良好的記錄。由於這幾乎從未發生過,點雲提供了一種理想的管道來顯示資產,因為它實際上存在於現實中。這意味著您可以將點雲處理為三維模型,並將其作為現有條件的最終記錄傳遞給設施所有者。為了讓這個想法更進一步,您甚至可以定期捕獲點雲,並對照設計模型檢查它們,以便在施工過程中發現偏差。
- 風險緩解
由於三維數據是對現有條件的記錄,囙此它也可以作為保險單。需要證明你所有的工作都做對了嗎?拉起三維數據,演示你到底做了什麼。
- 古蹟保護與恢復
歷史上重要網站的點雲是該網站的記錄,可供世界上任何人查看。這也是一個詳細的三維記錄,該網站的條件,這給你所有的資訊,你需要確定長期的恢復和維護計畫。
- 林業庫存
傳統的工作流程需要一組工人從森林的小塊土地上採集數据集,然後進行複雜的計算,從中推斷出整個森林的資訊。點雲改變了這種快速捕捉整個森林的數据集,並將其插入到林業軟件解決方案中,以獲取整個森林以及每棵樹的詳細數據。