
Emesent Hovermap 智慧地面控制功能
克服 SLAM LiDAR 長時間掃描的 IMU 偏移問題
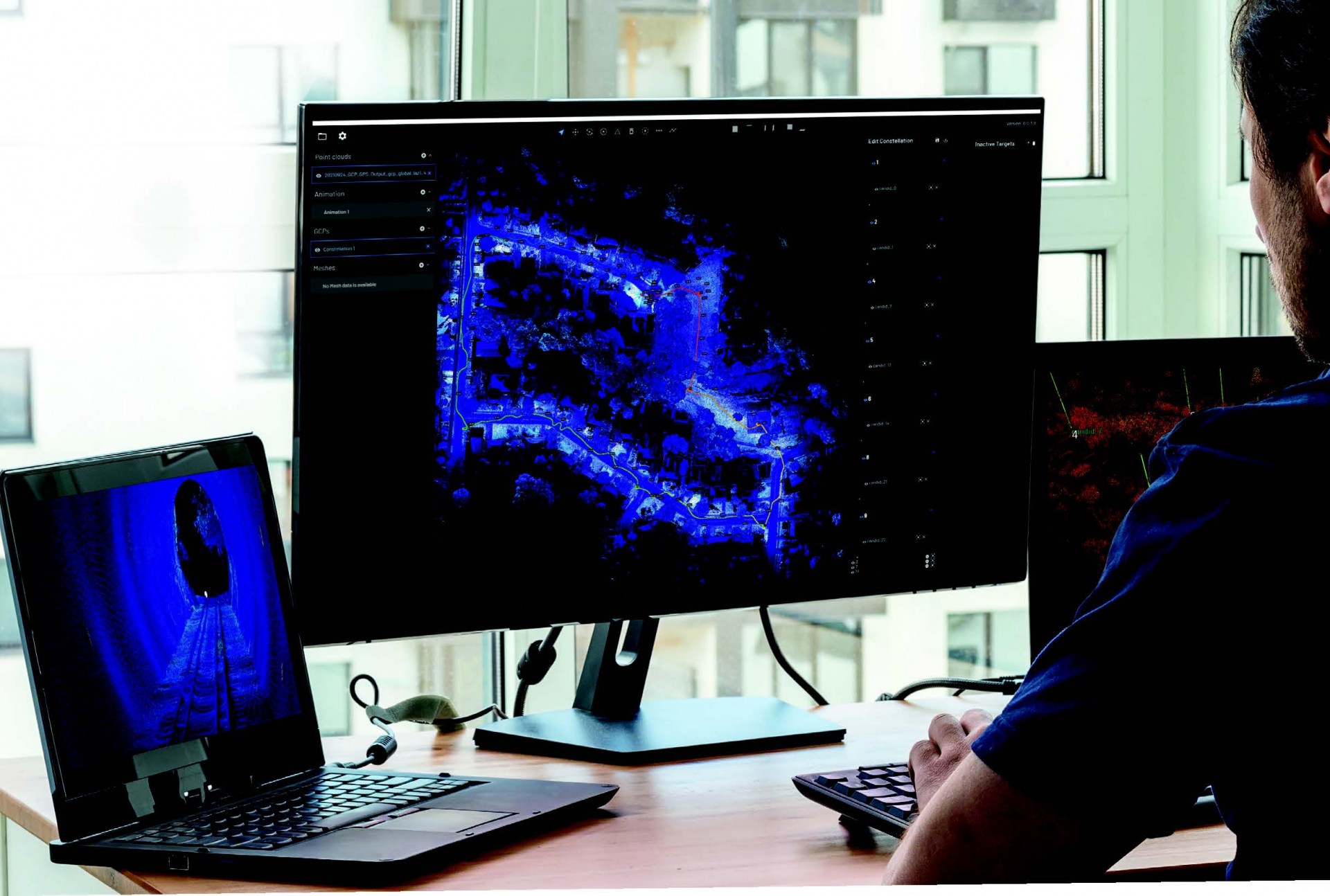
Emesent 的智慧地面控制功能是一種革命性的創新,利用可以自動偵測的掃描標,進一步優化 SLAM 演算法的計算成果,消除長時間掃描累積的IMU偏移,藉此提高 Hovermap 成果點雲的準確性。
這讓 Hovermap 可以適用於更多困難的情境,包括道路、體育場和隧道這些狹長、廣闊且缺乏幾何特徵的場景,或是連續 30 分鐘的掃描,而這些對於傳統的 SLAM LiDAR 來說,是非常艱鉅的挑戰。
應用情境
利用機器學習的演算法,Emesent 軟體會自動偵測點雲中的掃描標,並使用這些掃描標來對點雲進行地理坐標轉換並提高點雲拼接準確性。
• 提高點雲相對和絕對精度。
• 自動地理坐標轉換。
• 提升 SLAM 演算法的能力。
• 減少人工處理錯誤。
Emesent 的智能地面控制可進一步提高 Hovermap 點雲的準確性與賦予地理坐標資訊,提供使用者更多的機會與可能性。

以 Hovermap 連續掃描 900m,根據測試成果顯示,利用 10 個掃描標,使用者可以將點雲成果準確度提高到 11mm。
應用產品
Hovermap 是新一代高智能的 SLAM LiDAR 測繪系統,使用新穎的 SLAM 演算法,即使在沒有 GPS 的環境中也能實現移動地圖繪製和自主無人機飛行。它利用專利的搭載基座,可快速靈活地在無人機、手持、背包或車輛間進行佈署切換,衍生出業界之最。精準著色點雲手持 LiDAR 掃描儀,檢核、調查、紀錄、輔助建模,是最方便快速的掃描方式,如同掃地機器人般,自動獲得完整無死角的彩色點雲資料。
