
解決方案
雷射掃描雷射掃描

點雲建模超簡單?輕鬆打造逼真的3D場景!
近年來點雲技術廣泛應用於建築測繪、文化保存、製圖...領域,而將點雲重新建立成3D模型時,現已可透過SketchUp Studio導入進行建模,輕鬆快速地創建與現場環境相符的3D模型,以進一步進行設計和渲染,在SketchUP中可隨時對點雲調整點大小、方向、位置,並在建模過程中設置點雲的透明度、剖切面,使建模過程更為方便。

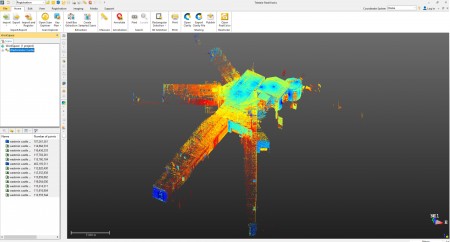
開車繞一圈,輕鬆完成你的掃描工作 - 掃描可以這麼簡單
Hovermap為移動式掃描設備,最高可承受時速40公里的變化,因此能夠輕鬆地在無人機、手持、背包或車輛間進行佈署切換,操作者搭配平板電腦,可以操控設備及即時預覽成果,輔助現場決策判斷。 而其優秀的SLAM演算法,搭配自動偵測的掃描標,可以進一步優化 SLAM 演算法的計算成果,藉此提高 Hovermap 成果點雲的準確性,使其能適用於更多困難的情境,包括道路、體育場和隧道這些狹長、廣闊且缺乏幾何特徵的場景,或是連續長達30分鐘的掃描。
Realworks一鍵拼接,自動優化提升點雲處理效率
隨著技術的進步,點雲模型的拼接也不斷進化,以往在拼接點雲模型時,我們常常需要逐個選擇並標記3~4個特徵點,然後進行拼接和優化。這樣的操作不僅繁瑣,還需要耗費大量時間和精力。
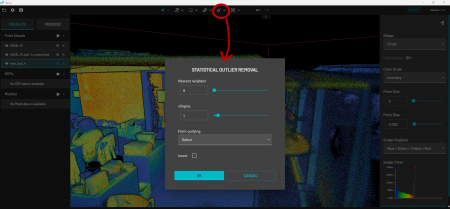
一鍵優化點雲品質!濾除雜訊so easy
當我們利用雷射掃描儀掃描獲取資料之後,不論是利用Hovermap的SLAM LiDAR移動式雷射掃描儀或固定式地面雷射掃描儀,在面臨龐大的點雲資料時常常覺得很困擾,不知道要從何下手,此時Emesent Aura的自動濾除雜訊點功能,大大節省了處理點雲資料的時間!

特徵太少太相似,隧道掃描總是拼接失敗?試試看Emesent的Automated Ground Control (GCP)功能
Hovermap為移動式掃描設備(SLAM LiDAR),最高可承受時速40公里的變化,因此能夠輕鬆地在無人機、手持、背包或車輛間進行佈署切換,操作者搭配平板電腦,可以操控設備及即時預覽成果,快速完成各種環境的掃描任務。 但特徵太少或太相似的環境,例如:隧道、快速道路等,對使用SLAM演算法的掃描儀來說,是一種相當艱鉅的環境,因為沒有足夠的特徵來修正隨著時間累積的偏移誤差,常常導致點雲成果變形或是拼接失敗。 Automated Ground Control (GCP)是一項創新功能,軟體的演算法會自動偵測點雲中的掃描標,並利用這些掃描標提高 Hovermap 點雲的準確性與賦予地理坐標資訊—提供使用者更多的機會與可能性。
公司想引進雷射掃描技術(光達),卻擔心工程師學不會?Emesent Hovermap,讓你半小時就上手!
許多測量公司、工程營造單位,面對新穎的雷射掃描技術(光達),總是又愛又怕。一方面,因為其快速、便利的特性,想要將其引進日常的工作流程中;另一方面,因為雷射掃描儀器相當昂貴,且與傳統測量儀器操作方式相差甚多,擔心團隊最終無法順利學會,反而浪費了大筆資金。 Emesent Hovermap為移動式掃描設備(SLAM LiDAR),除了優異的點雲成果品質跟攜帶方便外,其最大的特性為軟、硬體操作簡單。 根據我們實際的教學經驗,就算是無掃描經驗的客戶,也只需要1小時的教學,即可上手掃描工作,因為工程師只要用平板電腦,就可以輕鬆操控設備及即時預覽成果,快速完成各種環境的掃描任務。
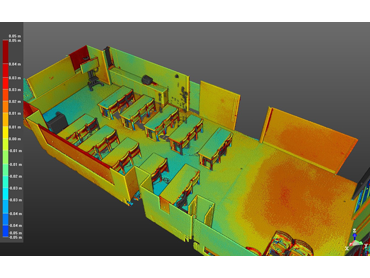
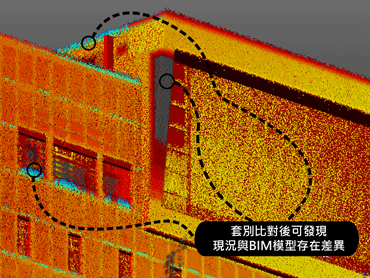
視覺化BIM施工檢測,比對結果一目了然!
在建築施工過程中,經常出現施工與設計模型不一致的情況,這導致了重工和人工檢驗成本的增加。然而現今我們已經擁有了點雲技術,它能夠迅速掃描現場實際情況,然後將其與BIM原始設計模型進行比對。通過視覺化方式呈現,自動化地比對了複雜的建築、管線、空間狀態,並標記出超出誤差標準的物件。這些問題物件被清晰明確地顯示出來,不僅確保了工程的精確性,還極大地減少了錯誤,節省了寶貴的時間和成本,同時也確保了建築的品質達到預期水平。

Emesent Hovermap 隧道檢測解決方案,可減少對交通的干擾,同時確保工作團隊的生命財產安全
近期許多測量公司、工程營造單位,在面對隧道類的檢測工作時,都遭遇了到一項艱鉅的挑戰-「能進場施作時間的大幅縮短」,主要是因為管理機關希望能最大幅度地降低對交通順暢的影響,因此大幅調降人員能進場施測的時間,尤其是針對高速公路、鐵道上的隧道更是要求。 由於隧道檢測的測量工作,常常具有連續性跟時效性的需求,若將施測時間從每日8小時縮短成每日最多2小時,不止整個工期將因此延長,甚至許多測量工作會難以進行或產生誤差,進而導致產生許多額外作業費用,而這些都將會反應在標案金額上。 因此許多單位都開始想要將雷射掃描技術(光達)引進隧道檢測的工作流程中,藉此提高檢測工作效率,或是說縮短需要進場測量的時間,將其改為內業處理點雲的時間,但始終因為儀器相當昂貴,且與傳統測量儀器操作方式相差甚多,擔心團隊最終無法順利學會,而望而卻步。
不懂測量的新手也可以輕鬆獲得有地理坐標的高精度點雲-Hovermap+背包RTK
Emesent Hovermap強大的SLAM演算法,已經可以在大部分的室內、室外環境,利用手持、背包或結合無人載具(ex.UAV)輕鬆、快速地以移動式掃描獲取完整、高品質點雲。 但對於SLAM演算法來說,特徵稀少/大範圍的空曠場域會是一個艱鉅的挑戰,雖然Emesent已經對那些追求精度的客戶提供了GCP模組來解決這項難題! 不過對於追求提升效率、節省戶外工作時間的客戶來說,背包式RTK將是他們的全新選擇 -無需花費額外時間佈設 GCP 即可對大面積、特徵稀少的空曠環境進行移動式掃描,並最終獲得具有絕對地理座標的公分級精度點雲資料!
教你正確轉換檔案,結構化點雲的眉眉角角
在學術上,結構化點雲與非結構化點雲通常被解釋為數據排序方式上的編碼組織差異。然而,在實際應用中,這兩者之間還存在一些重要的差異。 首先第一,經由3D固定式光達掃描生成的點雲檔案,經過軟體轉換為結構化點雲的過程可能需要一些時間。儘管如此,結構化點雲在後續的應用和處理中表現出更良好的效能。相反,非結構化檔案導出速度較快,但在後續應用和其他處理方面則可能較為耗時。

Emesent Hovermap-輕鬆獲取廠房管線設備的完整點雲,大幅加速你的逆向工程
工業廠房,尤其是高科技、石油化等相關行業的廠房,若需要進行任何內部的變動,如廠房改建/擴建、設備新增/移動…皆需要仔細地規劃、執行、風險管理並遵守相關的安全標準,以免發生任何的錯誤對公司產生極大的損害。 為此,許多客戶選擇在對廠區進行任何變動前,先利用點雲為廠區進行逆向工程,建立當下最正確的圖資,藉此來優化管理層決策、降低執行風險和提高作業效率。經許多實際案例的驗證,這種方式的確有助於類似專案的成功和廠房設施的長期營運效率。 Hovermap可以利用人力、無人載具來進行輕鬆、快速的移動式掃描,在極短的時間內,獲取完整、高品質的點雲資料,並可以輕鬆匯出到 3D 建模工具中。 建模人員因而能在最快的時間,獲取到最完整、正確的現場資訊,從而提高整個變動專案的執行效率、準確性。

42 天搞定萬坪廠房測繪!SLAM LiDAR 如何終結人工丈量惡夢?
42 天搞定萬坪廠房測繪! SLAM LiDAR 如何終結人工丈量惡夢? 在工業 4.0 與數位轉型的浪潮下,廠房若想順利導入物聯網 (IoT) 或打造數位雙生(Digital Twin),第一步就是必須擁有 100% 準確的現況圖資或模型。然而,台灣許多既有廠房往往缺乏完整圖面,或面臨建築圖資與實際現況不符的窘境。傳統的丈量方式不僅耗費大量人力與時間,更難以確保數據的精準度。本文將深入解析如何透過最新世代的「SLAM LiDAR 移動式雷射掃描技術」結合逆向測繪,在短短 42 天內完成近萬坪(約 32,600 平方公尺)大型維修廠房的數位化建置,為智慧製造奠定最堅實的基石。 傳統丈量為何成為廠房擴建的「無底洞」? 過去,廠房改建或機電管線整合,高度仰賴人工拿著雷射測距儀逐個空間進行分段量測。這種做法不僅效率低落,更隱藏著影響工程品質的致命風險: • 人為誤差疊加:從測距儀的瞄準角度偏差、結構角點的主觀認定差異,到人工抄寫數據時的筆誤,每一個環節都極易受到人為因素影響。在空間尺度大的廠房中,這些誤差不斷累積,最終將導致設計與施工的嚴重偏差。 • 環境限制重重:廠房內常見的高挑天花板、大跨度結構,或是四處堆放的障礙物,都是傳統人力與設備難以完整覆蓋的死角。 • 隱形成本驚人:為了確認管線或結構的確切位置,人員需頻繁往返現場複測,加上廠房作業時間的限制,不僅拉長了前期規劃的時程,更墊高了龐大的人力成本。以近萬坪的廠房為例,傳統作業時間往往上看 90 天以上。 破局之道:Scan to CAD 新世代測繪科技 要終結上述惡夢,我們必須用科技取代純人工。「Scan to CAD」正是利用三維掃描儀器獲取現有物件的外觀與尺寸數據,再轉化為電腦輔助設計 (CAD) 檔案的數位模型。專業測試指出,透過具備 SLAM (同步定位與建圖) 技術的移動式光達設備(例如 Emesent Hovermap STX),測繪人員可以將高精度掃描儀搭載於背包、手持,甚至結合無人機或三輪車進行快速移動掃描。它擁有每秒擷取 64 萬點的驚人運算速度與正負1 公分的雷射精度,能快速將複雜的實體空間完整「複製」到數位世界,形成高密度的三維點雲資料。 42 天搞定萬坪廠房測繪!SLAM LiDAR 如何終結人工丈量惡夢? 42 天搞定萬坪廠房測繪!SLAM LiDAR 如何終

雷射掃描技術應用 – 法證、鑑識
Trimble雷射掃描技術應用 ,創新的解決方案,適用於交通事故和犯罪現場重建等司法調查工作

應用掃描技術如何協助司法調查?
Trimble 地面式掃描儀解決方案,適用於交通事故和犯罪現場重建等司法調查工作。 使用者無須測量專業背景即可輕易操作,快速、完整地保存現場三維點雲資訊,利用點雲資料重建案件現場,滴水不漏地進行調查分析工作!
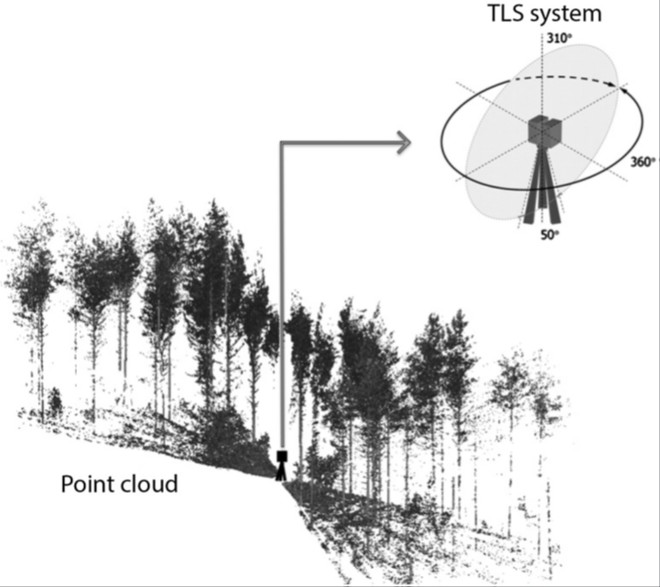
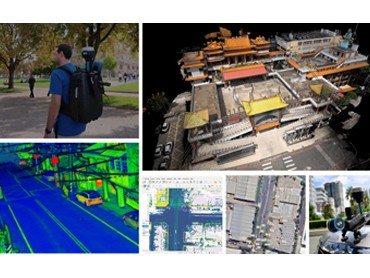
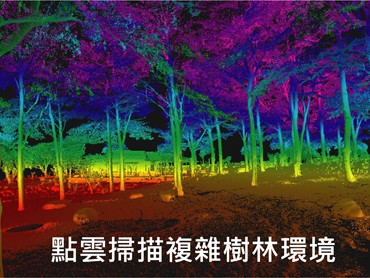
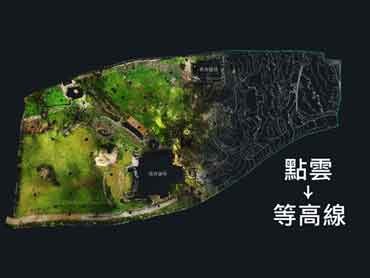
雷射掃描技術應用–林業應用
雷射掃描技術應用–林業應用,傳統森林調查方式相當花費人力與時間,而空載雷射掃描儀(空載光達) 能相對快速獲取整個林區點雲,因此國內開始引進雷射掃描技術來加速森林調查作業。
利用雷射掃描技術協助林業應用
近年空間資訊的技術顯著提升,雷射掃描技術已被廣泛應用在林業中,利用點雲資料能協助管理單位獲取多樣的森林資訊,如林木位置與高度、樹胸徑、樹胸圍、分辨樹種、樹冠高度模型及葉面積指數等。
為「真實世界」做設計: 以點雲技術串聯現場環境與虛擬模型
隨著科技的快速發展,現已能利用 LiDAR 光達掃描技術,串聯起真實世界的物理環境與虛擬模型,在虛擬模型中呈現實體環境的「真實」情況,亦即所謂的數位孿生(Digital Twin),虛擬世界與真實世界正在逐漸跨入「同步化」的資訊互動狀態。

Hovermap 實例分享 - 梨山森林調查並取得 3D 數據
很榮幸有機會能與嘉義大學森林暨自然資源學系暨研究所 林金樹教授合作,共同進行梨山森林調查。 本次選中的調查區域為曾經發生大火的高處,然而梨山坡度大、樹林茂密且未曾開墾,普通人貿然上山相當危險,透過 Hovermap 進行自主探索掃描,擁有強大避障功能,可偵測極小物體,即使是樹枝樹葉也能輕易掌握,同時進行自動探索,輕鬆穿梭於森林之中,視距外飛行也不須擔心,並能保證帶回完整且高精度的森林、樹冠及山坡地 3D 資料,光榮返航。 團隊首次執行森林任務便大獲成功,不但儀器及工作人員皆可相當安全且快速地完成任務,同時獲得最佳成果,為未來的森林調查方式寫下新的篇章!

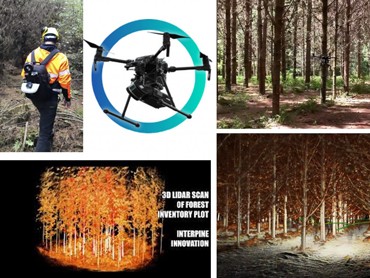
用Emesent Hovermap快速獲取森林點雲資料 - 掃描可以這麼簡單
近年空間資訊的技術顯著提升,雷射掃描技術已被廣泛應用在林業中,利用點雲資料能協助管理單位獲取多樣的森林資訊,如林木位置與高度、樹胸徑、樹胸圍、分辨樹種、樹冠高度模型及葉面積指數等,以尋求更好的方法來監測森林結構和管理森林功能。
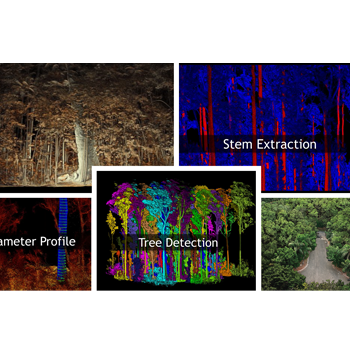
Hovermap讓森林測量及調查變得輕而易舉
近年空間資訊的技術顯著提升,雷射掃描技術已被廣泛應用在林業中,不但可快速獲取完整的森林點雲資料,使用者可進一步處理點雲得到林木位置、高度、材積、樹胸徑、樹胸圍、分辨樹種、樹冠高度模型及葉面積指數等重要資訊,也可用於碳匯、碳權計算,對近期提倡的淨零排放議題可說是十分重要。 Emesent Hovermap為移動式掃描設備(SLAM LiDAR),使用者可以在手持、背包或載具之間輕鬆切換,無論是搭配無人機,在森林裡進行自主探索掃描,或是以手持、背包的方式,隨意地自由走動進行掃描工作,唯一的限制只有不要超過它的極限速度(以Hovermap STX來說,也就是時速50-60公里) 後續搭配專屬軟體 Aura 來快速產製點雲資料並自動濾除移動物體及雜訊,再利用點雲分析軟體,即可在完整的森林點雲資料中,將樹木的部分萃取出來,並加以計算所需的高度、胸徑或體積等資訊!

Trimble X7 with FieldLink - 於現場結合點雲與 BIM 模型
輕鬆收集高度準確的點雲資料和 3D 信息,與 CAD / BIM 模型進行比較,以用於設計驗證、進度監控、偏差和表面分析以及碰撞檢測。

掃描可以這麼簡單 - Emesent Hovermap 室內自主飛行測繪
Hovermap可快速靈活地在無人機、手持、背包或車輛間進行佈署切換,且自主避障功能使其能夠在沒有 GPS 訊號的地方,如同掃地機器人般,自動進行掃描,獲得完整無死角的點雲資料。

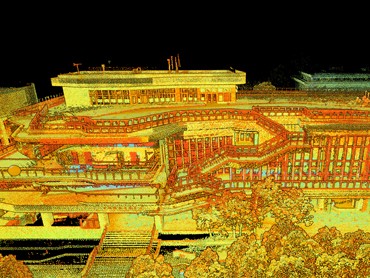
雷射掃描技術應用–歷史建築保存
雷射掃描技術應用–歷史建築保存,Trimble X7 為保存歷史建築提供快速、準確的全面性解決方案。
輕鬆、快速完成古蹟文物掃描
台南市小東門段遺址快速掃描實際案例

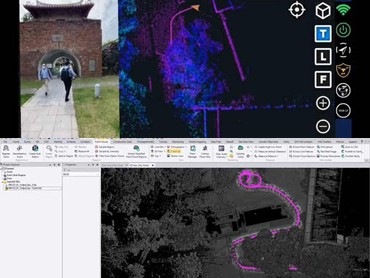
【實例分享】利用 Hovermap 快速產製歷史建築的內外部三維模型
emesent Hovermap 是新一代高智能的 SLAM LiDAR 測繪系統,利用專利的搭載基座,可快速靈活地在無人機、手持、背包或車輛間進行佈署切換,衍生出業界之最。精準著色點雲手持 LiDAR 掃描儀,檢核、調查、紀錄、輔助建模,是最方便快速的掃描方式,如同掃地機器人般,自動獲得完整無死角的彩色點雲資料。
雷射掃描技術應用–歷史建築保存
雷射掃描技術應用–歷史建築保存,Trimble X7 為保存歷史建築提供快速、準確的全面性解決方案。

認識掃描工作最好的朋友:Trimble 的機器人掃描解決方案
使用與 Spot 機器狗整合的 Trimble X7,我們可以記錄工地現場的變化並快速做出重要決策,而不是等待數小時或數天才能將訊息傳遞給我們的專案團隊。 這使我們能夠利用即時訊息盡快做出最佳決策。

相片不夠看,帶你近看如何得到 3D 點雲!
點雲掃描技術是一種能夠得到三維空間資訊和重現立體圖像的方法,常用來輔助模型建立。現今最新的點雲掃描利用移動測繪的方式,快速得到點雲成果。移動式 LiDAR 掃描技術,5 分鐘就完成巨人雕像的點雲掃瞄,整個過程只要一個人背著 Hovermap 背包並以手持的方式從底部往上繞雕像一圈。
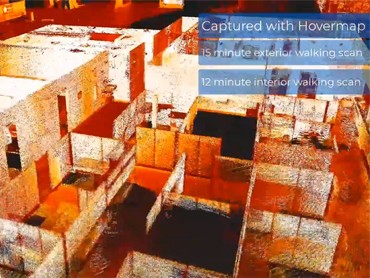
應用 Emesent Hovermap 實現 Scan to BIM
使用 Emesent Hovermap 掃描提供的高質量點雲可以更輕鬆地創建數位孿生,並減少產製點雲所需的時間。唯一的測量員使用 Hovermap 掃描儀進行半小時(15 分鐘室外 / 12 分鐘室內)的步行掃描,捕獲了建物內部及其周圍環境。

Emesent Hovermap 智慧地面控制功能
Hovermap 可以適用於更多困難的情境,包括道路、體育場和隧道這些狹長、廣闊且缺乏幾何特徵的場景,或是連續 30 分鐘的掃描,而這些對於傳統的 SLAM LiDAR 來說,是非常艱鉅的挑戰。

次世代自主測繪光達 - Emesent Hovermap
從建築物、古蹟、公共設施到森林、邊坡等人員無法輕易接近的危險區域,Hovermap 皆可快速輕鬆地完成掃描任務。

用自己的解決方案蓋自己的大樓 - Trimble Building Solution
Trimble 和承包商 NCC 展示了 Trimble Building 部門的 BIM 解決方案,以及它們如何被實踐在工地現場。
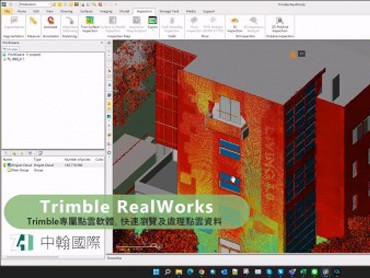
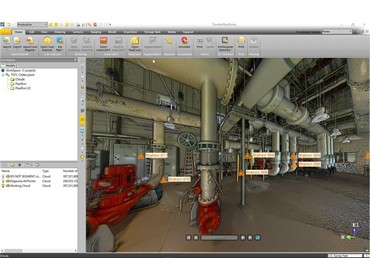
除了快速掃描,更需要強大的後端處理軟體!
以 Trimble X7 搭配 Trimble FieldLink 輕鬆收集高度準確的點雲資料和 3D 信息,回到辦公室後再使用 Trimble RealWorks 以電腦效能處理點雲,以更順暢、更強大的功能進行瀏覽、處理、模型數化與分析應用。
Hovermap 魔法般的科技:15 分鐘完成臺北小巨蛋掃描
Emesent Hovermap 是一項革命性的移動測繪系統,它使用了 SLAM(Simultaneous Localization and Mapping)技術,能夠在短時間內完成大型建築物的三維掃描。中翰團隊使用 Hovermap 在臺北小巨蛋進行了一次十分成功的外觀立面掃描,僅僅只花費了 15 分鐘的時間。



『從高空到地面,從室內到室外』多載具掃描全面進化!
中翰團隊成功應用 Hovermap 的先進技術,結合無人機空載光達與裝載於背包的移動掃描方式 ,精準快速地掃描建築物生成點雲模型。無人機掃描花費 10 分鐘、行走式掃描 20 分鐘,掃描時間僅僅半小時就能達到公分級完整點雲成果,Hovermap 特殊的插拔設計可以快速地轉換不同載具,相較於傳統測繪技術更加靈活許多。
【實例分享】利用 Hovermap 快速產製歷史建築的內外部三維模型
emesent Hovermap 是新一代高智能的 SLAM LiDAR 測繪系統,利用專利的搭載基座,可快速靈活地在無人機、手持、背包或車輛間進行佈署切換,衍生出業界之最。精準著色點雲手持 LiDAR 掃描儀,檢核、調查、紀錄、輔助建模,是最方便快速的掃描方式,如同掃地機器人般,自動獲得完整無死角的彩色點雲資料。

建築渲染新境界:結合點雲掃描與BIM打造出令人驚豔的成果
利用Hovermap的SLAM LiDAR移動測繪技術或Trimble X7與X9的自動拼接掃描,我們可以快速地獲取現場的空間資訊進行建模應用,而現在,點雲還可以導入Twinmotion進行渲染後製,短時間內就能將BIM模型套疊在點雲模型上,轉換為真實感十足的3D影音圖像。

Trimble 3D 雷射掃描:從精準量測到智慧施工
Trimble 3D 雷射掃描:從精準量測到智慧施工 全面優化品質控管、施工效率與風險管理 在工業製造與施工流程中,任何微小誤差皆可能引發連鎖效應,包含設備安裝延誤、工序衝突及整體工期拉長,進而增加營運成本與專案風險。導入Trimble 3D雷射掃描技術,能於製造至施工各階段提供高精度空間數據,有效確保作業一致性與精準度,從源頭降低返工機率與材料浪費,提升整體專案執行品質。 1 降低施工風險:減少製造商與承包商風險,提升作業安全性與可控性 2 品質與精度提升:提高精度與公差控制,全面提升製作品質。 3 效率與成本優化:加快製程、支援不停機施工,並有效降低整體成本。 Trimble 3D 雷射掃描:從精準量測到智慧施工 於車間預製階段,3D雷射掃描技術已成為品質驗證最即時且數據化的工具。透過將掃描取得之高密度點雲資料與原始設計模型進行比對,可快速辨識構件偏差與潛在誤差,大幅降低後續現場調整與重工成本,確保構件於施工現場能順利銜接與安裝。 Trimble 3D 雷射掃描:從精準量測到智慧施工 此外,高精度點雲還可用於重建廠區設備、管線及結構空間,為後續設計與工程規劃提供依據。於管線改造或設備配置階段,透過精準掌握既有條件,可提前進行路徑優化與干涉檢核,避免施工過程中發生碰撞或錯誤,進一步提升設計決策品質與施工正確性。 Trimble 3D 雷射掃描:從精準量測到智慧施工 3D雷射掃描技術不僅強化品質控管,更在安全、效率與成本管理上展現顯著效益。其應用可有效降低施工風險,同時支援不中斷生產之工程測繪模式,大幅加速專案推進,為工業製造與智慧施工奠定堅實的數據基礎。

Scan to CAD:把廟宇「掃」進 CAD 的新世代技術
廟宇建築因其構造繁複、裝飾細節豐富且空間層次多變,依靠傳統的人工丈量方式 (全站儀、紅外線測距儀) 通常難以完整的詳實記錄。而本案採用 Emesent Hovermap 搭載 UAV 無人機進行空中 LiDAR 掃描,結合室內步行掃描資料,建立高密度的三維點雲,完整掌握建築裡、外的輪廓,作為後續建模與圖資轉換的基礎。 高效率資料擷取與處理 UAV 搭載 LiDAR 可快速完成大範圍掃描,搭配自動化拼接與處理流程,大幅縮短作業時間。 高精度三維重建能力 點雲資料具備高密度與高解析特性,可精準還原建築幾何形體與細部特徵。 完整性與可延展性高 整合空中與地面掃描,有效降低遮蔽影響,並可延伸應用於 BIM、分析與後續設計作業。 Scan to CAD:把廟宇「掃」進 CAD 的新世代技術Scan to CAD:把廟宇「掃」進 CAD 的新世代技術 在資料處理流程上,人員首先將多批次掃描成果匯入 Trimble RealWorks 進行點雲拼接與平差,再清除雜訊提升資料品質後導入AutoCAD製圖。 Scan to CAD:把廟宇「掃」進 CAD 的新世代技術Scan to CAD:把廟宇「掃」進 CAD 的新世代技術 一般傳統的丈量作法是用紅外線測距儀測量空間尺寸再繪製為CAD圖 (約2個月),但透過3D掃描儀與無人機的輔助,從我們開始掃描到轉為CAD平面圖僅花費了12天,且平面圖還比人工丈量的精度更高、資訊更詳細! Scan to CAD:把廟宇「掃」進 CAD 的新世代技術 其點雲資料後續還做為數位典藏之數據基礎,作為建物「時間凍結」的關鍵工具,保存當下環境的紋理,可運用於建模、3D列印、VR模擬、空間研究...等多領域應用。
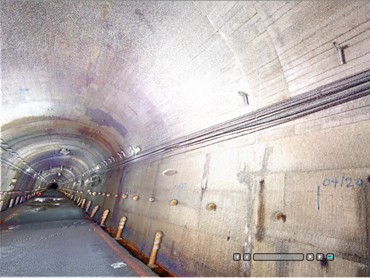
雷射掃描技術應用 – 隧道監測
隧道變形監測具有預防隧道變形、塌方等重要作用,為評估隧道穩定及安全性的重要程序之一。隨著雷射掃描技術提升,利用地面雷射掃描儀(地面光達)獲取隧道三維點雲來進行變形監測,在國內外業界已經逐漸普及。

利用 Emesent Hovermap 加速公路隧道檢測
傳統上,隧道的檢測是由現場人員手動進行的,從最簡單的步行並記錄和拍照,到利用全站儀進行斷面監測。這類工作通常需要至少六個小時,並且必須在白天進行。在工作期間,出於安全原因,隧道必須要禁止車輛通行。

Hovermap 隧道掃描
隧道的施工維護,由於環境不佳,對工程團隊來說是一大考驗。如果能快速、輕鬆的取得隧道點雲資料,就可以依照三維點雲建立模型,透過模型資料,幫助整個工程團隊。 Hovermap 能夠進行隧道掃描,在無 wifi、無 GPS 的情況下依舊能夠得到三維點雲。

利用 Emesent Hovermap 提高地形測量的效率和安全性
在 2020 年,UDM Group 投資了 Hovermap LiDAR 測繪系統。部署 Hovermap 後,UDM Group 可以在不到一小時的時間內完成一項複雜且具有挑戰性的任務,現場只需一名測量員。

【實例分享】零經驗輕鬆上手,快速掃描成大校園
Hovermap 主機僅有 1.6 公斤,可搭配輔助扣環掛載在背包上進行掃描。透過 SLAM LiDAR 技術,於一般校園環境中不需反射標即能達成任務,取得完整可靠的成果,沒有相關經驗及背景,也能快速上手!
【實例分享】科技佈局監測魚塭
Emesent Hovermap 是新一代高智能的 SLAM LiDAR 測繪系統,它利用專利的搭載基座,可快速靈活地在無人機、手持、背包或車輛間進行佈署切換,衍生出業界之最。精準著色點雲手持LiDAR掃描儀,檢核、調查、紀錄、輔助建模,是最方便快速的掃描方式,如同掃地機器人般,自動獲得完整無死角的彩色點雲資料。

【實例分享】香蕉園掃描 - 移動式光達的農業應用
去年底中翰團隊與成功大學測量系教授合作,希望透過移動式光達掃描位於屏東的香蕉果園,獲得絕對坐標,利用永久保存的點雲資料,後續可隨時進行分析,如香蕉樹實際分布位置、尺寸、數量、生長情形及產量評估。

還在為定平而煩惱嗎?Trimble X7替你解決!
傳統測量不論是全站儀、水準儀或是高科技的地面式雷射掃描儀,在開始設定測站資料之前,都需要進行定平的動作,而每一次換站時需要重新定平,對於非專業量測人員來說可是一大痛處,不過!Trimble X7的45度自動水準補償可以大大省去這樣的麻煩!
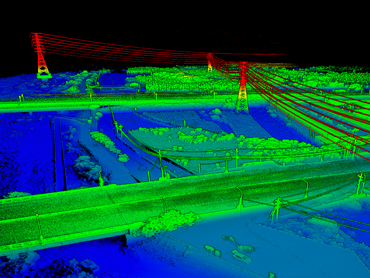
智慧化電塔巡檢解決方案:無人機 × SLAM LiDAR 應用
智慧化電塔巡檢解決方案:無人機 × SLAM LiDAR 應用 應用無人機搭載Emesent Hovermap掃描電塔 面對電力系統中傳統電塔巡檢耗時、高風險且數據難以完整掌握的挑戰,團隊採用 UAV 搭載Emesent Hovermap SLAM LiDAR,快速且安全地取得包含電塔本體、導線、絕緣子等細節的高品質點雲資料,精確掌握電塔結構與周邊環境資訊,提升能源產業的資產維護效率。 優點 1 高效率: 透過無人機搭載 Emesent Hovermap 之 SLAM LiDAR 掃描技術,團隊可在短時間內完成電塔全結構的三維掃描作業,大幅降低傳統人工攀爬與量測所需時間,提升整體作業效率與安全性。 2 詳細全面的數據:本次掃描成果完整呈現電塔本體、導線、絕緣子等細部幾何資訊,建立高品質點雲模型,可精準掌握各構件的相對位置與尺寸,作為後續電塔檢測、維修規劃與數位化管理的重要依據。 智慧化電塔巡檢解決方案:無人機 × SLAM LiDAR 應用 本次透過 UAV 空載移動式光達的環繞掃描,成功克服了地形與高度的限制,將高壓電塔及其周邊廊道完整轉化為高品質的 3D 點雲模型。 智慧化電塔巡檢解決方案:無人機 × SLAM LiDAR 應用 高品質的 3D 點雲模型,不僅為後續的巡檢比對、維護規劃與資產管理提供可靠依據,更大幅縮短作業時間並降低人力攀爬風險,實現巡檢流程的全面數據化與高效化。 影片中不但可見電塔鋼構的複雜桁架幾何與絕緣子串等關鍵組件皆被完整掃描,更能精確捕捉輸電導線的弧垂曲線,連同下方的地形起伏與周邊植被分佈皆無所遁形,為電力資產維護建立了最詳實可靠的數位資產。
戶外調查不用再反覆量測:3D掃描一次完成
戶外調查不用再反覆量測:3D掃描一次完成 Pentax HS-X1手持式掃描儀應用於道路、標線、路燈、行道路設施調查 傳統道路調查多仰賴全站儀與人工丈量逐點記錄,不僅需要反覆架站與移動儀器,亦容易受到車流干擾與視角遮蔽影響,尤其在空間環境複雜的場景下,往往需要多次測量各處平面與高程資料,導致作業時間拉長且成果整合受限 Pentax HS-X1可一次性獲取完整三維空間與真實色彩資訊,使道路調查從點位紀錄轉變為可全面檢視的數位場景,其硬體微秒級同步機制確保影像與點雲精準對齊,搭配每秒20萬點的資料擷取能力,單人即可完成大範圍掃描作業並即時預覽成果,大幅縮短外業時間與降低重工風險。 在都市道路與停車場空間中,管理單位常同時面臨設施清查與工程改善驗收等需求,例如需確認既有車格尺寸是否符合規範、盤查路燈與標誌牌位置是否正確、或在道路改善前後進行高程比對與成果驗證,這些任務往往涉及大範圍空間與多種類型設施,一旦後續設計變更或發生爭議,往往缺乏可回溯的完整空間依據。 透過Pentax HS-X1手持式掃描儀進行道路調查,作業人員沿著車道與人行動線自然行走掃描,系統即時生成彩色點雲並同步融合RTK座標,現場即可確認覆蓋範圍與資料完整性,完成外業後透過內業軟體進行點雲優化與動態物體濾除,整理測繪流程從資料採集到成果輸出一氣呵成。 在台中一處戶外實例中,掃描後可得到清晰的標線點雲成果,從3D的模型中直接量測寬度與角度,同時路燈與標誌牌高度、位置亦清楚記錄於模型中,當後續進行空間規劃或設施盤整時,設計與管理單位可直接於點雲中調取資料,形成客觀的驗收報告與空間資料庫,真正實現從現場丈量到數位孿生的全面升級。
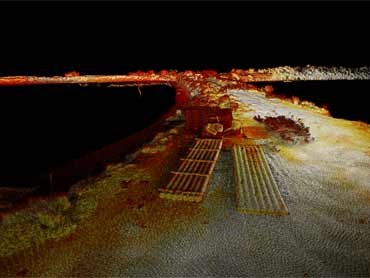
旱季河道雜草叢生,傳統測量除草費時又費力?
在水利工程、河川治理、土木工程、測繪工程及環境調查等作業中,常面臨植被遮蔽、地形起伏大、現地通行不易及傳統測量效率不足等問題,尤其在旱季雜草叢生或地表環境複雜時,更需投入大量人力進行除草、開路與逐點量測,不僅耗時費力,也難以完整保留現地整體空間資訊。透過移動式光達掃描,可快速取得大範圍、高密度三維點雲資料,進而提升堤防巡查、地形調查、工程規劃設計、災害防治評估等工作的作業效率與成果品質。 人員採用Hovermap ST-X進行河道周邊區域掃描,儀器掃描距離最遠可達300公尺,快速完成360度環境的點雲蒐集,兼顧高效率、高品質與靈活機動的作業需求。此外,藉由其多迴波量測的特性,即使在植被區域,仍可於部分縫隙中滲透下方的地表,有助於取得更接近實際地表的高程成果,並作為後續斷面圖製作的重要依據。 後續再透過點雲處理軟體擷取指定位置之斷面點雲,選取非植被地面點,保留較能代表實際地形的高程資訊,最後再匯出斷面數值資料快速展繪至 AutoCAD,完成斷面圖製作。 以點雲為基礎產製之斷面圖,除可表達地表高程起伏外,亦能同步呈現植被分布、坡面輪廓及周邊環境資訊,使成果不再只是單純的一條斷面線,而是更完整反映現地地貌特徵與空間關係。此類成果除有助於判讀地形現況外,也能提升後續規劃、設計與溝通之參考價值。

利用光達蒐集開挖工程變形資訊
近年空間資訊的技術顯著提升,雷射掃描技術已被廣泛應用在各領域,使用雷射掃描儀搭配專屬的軟體,在現場即可瀏覽點雲成果,很輕易地檢查點雲的完整性以及它們的品質,使用者可以利用彩色點雲資料計算後續工程需要的變形分析數據。

變形監測定義、應用及重要性
現今的變形監測技術朝著自動化、高精度、高效率發展,監測成果能夠以數據量化呈現,亦可以建模觀察變形前後的差異,在環境或工程等相關領域進行長期的觀察,為人們進行維護、修改、設計提供依據,同時發現潛在的危機。
掃描可以這麼簡單 - Emesent Hovermap 室內自主飛行測繪
Hovermap可快速靈活地在無人機、手持、背包或車輛間進行佈署切換,且自主避障功能使其能夠在沒有 GPS 訊號的地方,如同掃地機器人般,自動進行掃描,獲得完整無死角的點雲資料。

Hovermap 實例分享 - 回收廠自主飛行掃描與不規則堆疊物體積計算
偌大的回收廠房,常常堆疊著難以估算的各種回收物,高度通常有幾層樓高,回收物呈現不規則形狀且難以通行,因此通常難以計算體積。倘若能夠了解廠房內通常堆積量,則可依據此數據,分別針對車輛、人力、空間以及時間進行規劃及安排,提升工作的效率及收益。 本次藉由 Hovermap 加上無人機,使用自動飛行掃描,在十分鐘內完成任務,讓業者能夠輕鬆進行後續空間規劃,節省下時間及人力成本。
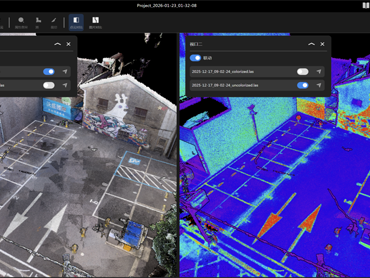
現況點雲掃描比對 BIM 模型實現『依模施工』
在建築和工程領域,準確分析現場實際狀況與既有 BIM(建築資訊模型)之間的差異非常重要,能夠在建築項目中發現潛在問題,並採取適當解決措施決,從而提高工程品質及效率。

3D 數據掌握施工│利用 LiDAR 技術優化現場管理
降低施工錯誤、減少重工成本,點雲掃描技術在施工現場的實踐運用。
進階應用:點雲掃描技術為隧道提供全面的差異比對分析
應用點雲掃描技術於隧道監測,相較於傳統的全站儀一個點一個點的監測方式,我們得以全面檢測隧道與模型之間的差異與變化。更能透過前次與後續掃描的點雲之間進行比對,工程人員能夠提前預測潛在問題,同時建立更為完整的竣工資料。

SLAM LiDAR應用於街道路樹災損調查
SLAM LiDAR應用於街道路樹災損調查 點雲比對用於風災前後街道路樹災損調查 山坨兒颱風肆虐高雄,強風豪雨使大量行道樹連根拔起、倒伏折損,並連帶造成路牌、交通號誌等道路設施受損或需汰換;然而以往災後調查多仰賴人工逐街逐段踏查,往往費時又費人力,且在災後遮蔽與路況混亂的情境下更容易出現遺漏,影響清除作業與復原排序。為提升盤點效率,中翰團隊在颱風侵襲前後分別進行街道光達掃描,建立兩期街景點雲資料,並透過點雲配準與差異比對,直接萃取變化發生的位置與變化幅度,快速辨識路樹消失、受損及樹冠結構改變的路段,同時將成果以視覺化方式呈現變異位置與變異量,讓災損盤點由全面巡查轉為針對變化熱點的精準查核;此外,該流程也能同步掌握路牌與交通號誌在風災損毀後的移位、倒塌或更新變化,全面提升災後調查與決策效率。 優點 1 高效率: 透過無人機搭載 Emesent Hovermap 之 SLAM LiDAR 掃描技術,團隊可在短時間內完成電塔全結構的三維掃描作業,大幅降低傳統人工攀爬與量測所需時間,提升整體作業效率與安全性。 2 差異量化、快速判讀:透過前後期點雲差異分析,可把變動以可量化的方式呈現,例如缺失範圍、位移幅度或高度差等,讓管理者快速掌握哪些區域變化最大、影響程度到哪裡,便於後續的優先順序判定與復原成效追蹤;同一套方法也能套用到道路附屬設施,清楚辨識路牌與交通號誌的新增、移除或位置變動。 SLAM LiDAR應用於街道路樹災損調查 本次利用Hovermap ST-X搭配車載RTK模組進行移動式掃描,在行進過程中快速建立街道3D點雲;再透過前後期點雲差異比對,將路樹與周邊設施的變化清楚標示並進一步量化,作為後續變化偵測與災損分析的三維資料基礎。 SLAM LiDAR應用於街道路樹災損調查 透過建立兩期街道3D點雲資料,先以配準統一座標基準,再進行差異比對以萃取路樹與街道設施的變化;這套流程不僅能支援災後損失盤點、清除與復原優先順序判定,以及後續復原成效追蹤,也能大幅縮短調查時間、降低大量人力外業投入,讓災後調查從傳統踏查轉為可量化、可視覺化的數據化作業。 影片中不但可清楚看見街道路廊被完整建模,行道樹的樹幹、樹冠形態與沿線設施輪廓皆被保留下來,更能透過風災前後點雲比對精準凸顯路樹缺失、枝葉結構改變與位移等差異,讓災損變化在三維視角中一目了然

高精度3D掃描,如何提升效率並維持穩定品質?
高精度3D掃描,如何提升效率並維持穩定品質? 自動校準、自動定平,讓現場作業更快、更穩、更省時 在測量、工程施工與空間資料建置工作中,使用者常面臨架站耗時、環境條件複雜、資料精度要求高,以及設備維護影響作業排程等問題。若現場需要在有限時間內完成點雲擷取,儀器的穩定性、操作效率及成果品質就顯得格外重要。具備自動校準、自動定平與高速掃描能力的3D雷射掃描設備,可協助使用者更快速完成現場作業,並兼顧量測品質與工作效率。 高精度3D掃描,如何提升效率並維持穩定品質? Trimble X9 3D雷射掃描儀具備自動校準、自動定平與高效率點雲擷取能力,協助使用者在建築、土木、廠房、古蹟、公共設施及工程現場,快速完成高精度三維空間資料建置。 高精度3D掃描,如何提升效率並維持穩定品質? X9於現場完成架站後,可利用自動定平功能快速完成儀器整平作業;儀器自動水平補償高達±45°,大幅降低架站時間,並提升現場作業效率。後續可依據實際作業環境、掃描目標分布情形及成果需求,規劃適當之掃描站位,執行多站掃描與重疊區域資料擷取,藉以建立各站間穩定之資料銜接關係,快速取得高密度且完整之三維點雲成果。 高精度3D掃描,如何提升效率並維持穩定品質? 相較於傳統掃描流程中需花費較多時間進行架站、檢查與後續校正,X9可在現場提供更穩定且直覺的作業方式,降低人員操作負擔,同時提升點雲成果的完整性與可靠性,特別適合需兼顧效率、精度與作業穩定性的測繪與空間建模工作。