
特徵太少太相似,隧道掃描總是拼接失敗?試試看Emesent的Automated Ground Control (GCP)功能
不止快速,還更輕鬆-Emesent Hovermap,掃描工作最好的朋友
Hovermap為移動式掃描設備(SLAM LiDAR),最高可承受時速60公里的變化,因此能夠輕鬆地在無人機、手持、背包或車輛間進行佈署切換,操作者搭配平板電腦,可以操控設備及即時預覽成果,快速完成各種環境的掃描任務。
但特徵太少或太相似的環境,例如:隧道、快速道路等,對使用SLAM演算法的掃描儀來說,是一種相當艱鉅的環境,因為沒有足夠的特徵來修正隨著時間累積的偏移誤差,常常導致點雲成果變形或是拼接失敗。
Automated Ground Control (GCP)是一項創新功能,軟體的演算法會自動偵測點雲中的掃描標,並利用這些掃描標提高 Hovermap 點雲的準確性與賦予地理坐標資訊—提供使用者更多的機會與可能性。
優點
1 攜帶方便、軟、硬體操作簡單(無經驗客戶教用1小時即上手)
2 專利快拆設計,可以快速靈活地在無人機、手持、背包或車輛間進行佈署切換
3 專屬APP,即時操作與預覽點雲
4 資料處理快速,掃描時間與處理時間1:1
5 搭配載具(無人機or機器狗)可自主避障&自動掃描(選配)

Emesent的Automated Ground Control (GCP)功能,利用可以自動偵測的掃描標,能進一步優化 SLAM 演算法的計算成果,消除長時間掃描累積的IMU偏移,藉此提高Hovermap 成果點雲的準確性,使其能適用於更多困難的情境,包括道路、體育場和隧道這些狹長、廣闊且缺乏幾何特徵的場景。

針對隧道或道路等特徵稀少的環境,在有佈設GCP的情況下,Hovermap使用者可以選擇以傳統步行掃描的方式進行,或是選擇以專屬雲台,將Hovermap吸附在車輛或其他載具上,以不超過儀器極限的速度(時速40公里內)行駛在測區道路上,輕鬆獲取地需要的點雲資料,後續再以GCP優化掃描資料,提高 成果點雲的準確性。
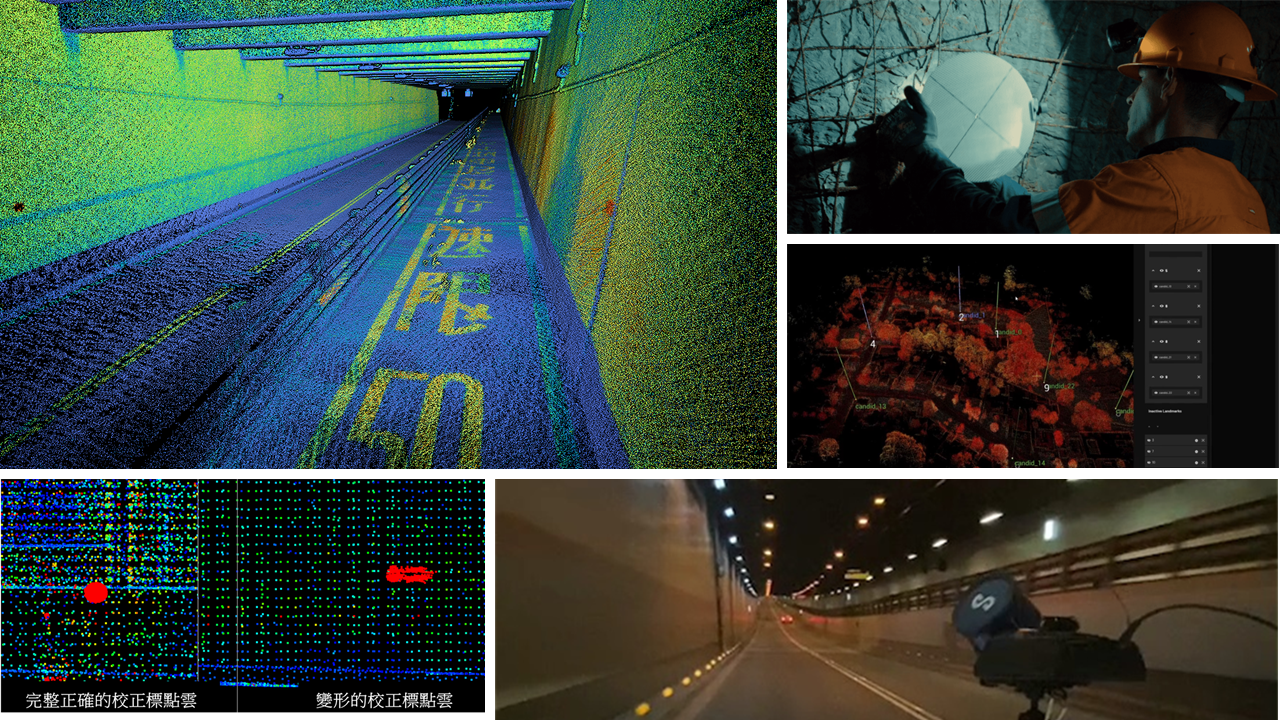
Hovermap結合Automated Ground Control (GCP)功能,可修正原本因為長時間掃描累積的變形及偏移誤差,如下圖內所示:在進行掃描前,使用者先佈設GCP並以全站儀量測其位置(相對位置或地理坐標皆可),再以Hovemrap進行隧道掃描,從成果可看出,在未使用GCP功能修正前,掃描標的點雲因為誤差累積而變形,使用GCP功能修正後,掃描標即可恢復為原本的形狀。