Maverick-可肩背式移動式光達系統

Optech Maverick移動測繪系統重量輕到足以配戴在背包上,由Segway攜帶或綁在汽車的車頂上,為尺寸,便攜性和多功能性設定了很高的標準。Maverick具有強大的功能和便攜式功能,每秒收集成千上萬個光達點,同時具有360°相機圖像以及位置和方向數據。
這種靈活性使測量工程師可以使用Maverick進行資產建置,運輸安全,建築,鐵路公用事業,3D建模等,甚至擁有大型車輛無法進入的小巷和小路等位置的資料。
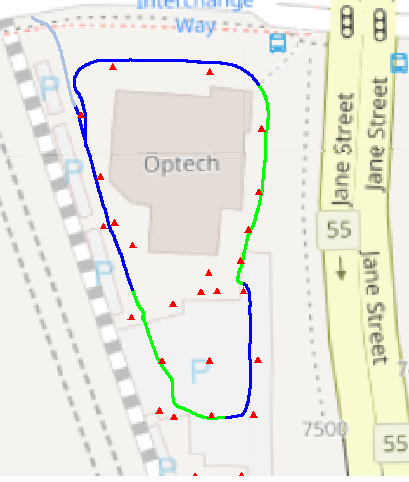
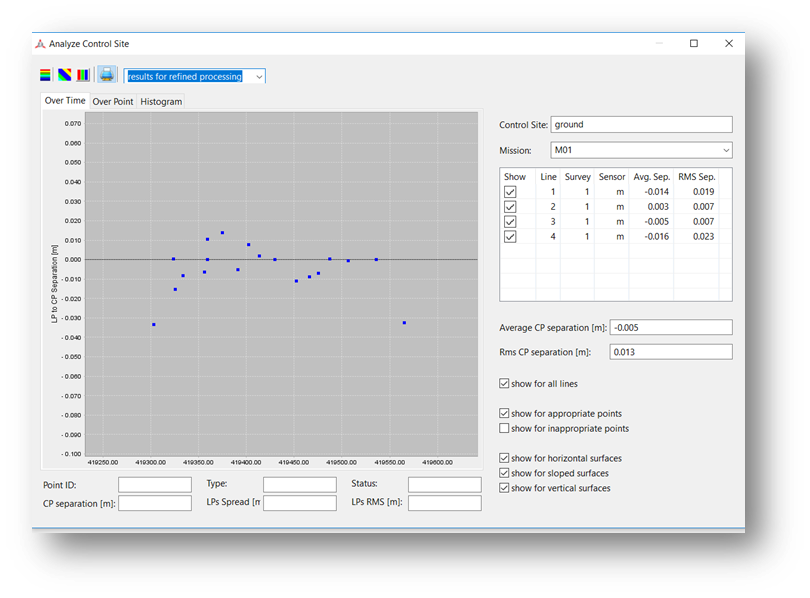
沿路架設控制點可以增加精度
控制點可以提高精度
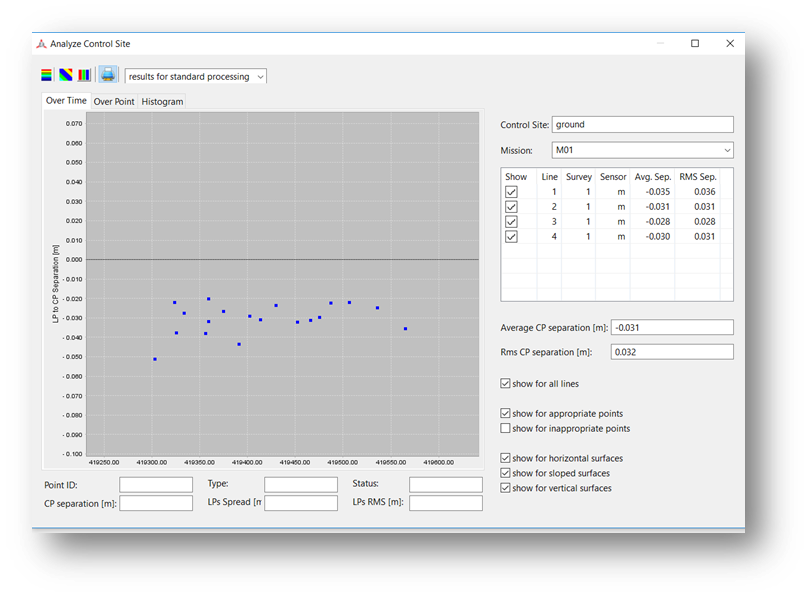
加入控制點前整體精度座落在1-6公分之間。
加入控制點後
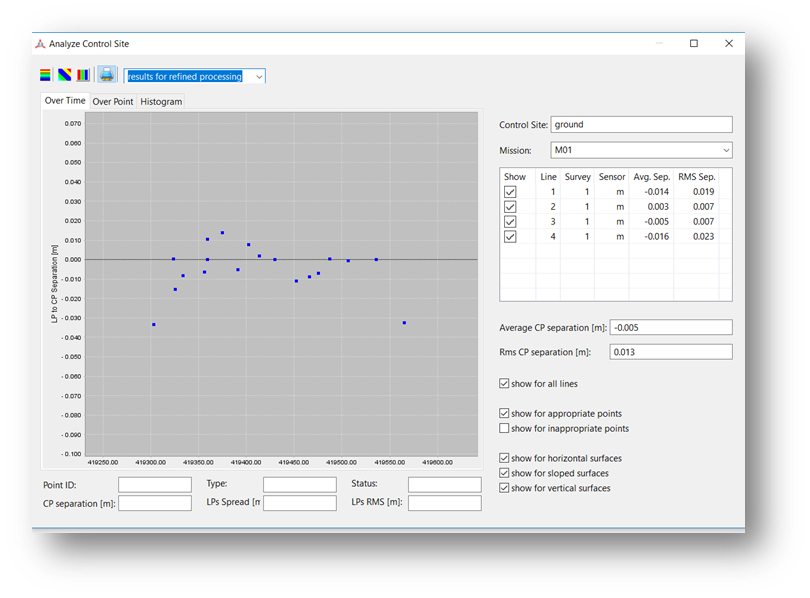
整體精度提升在1-4公分之間。
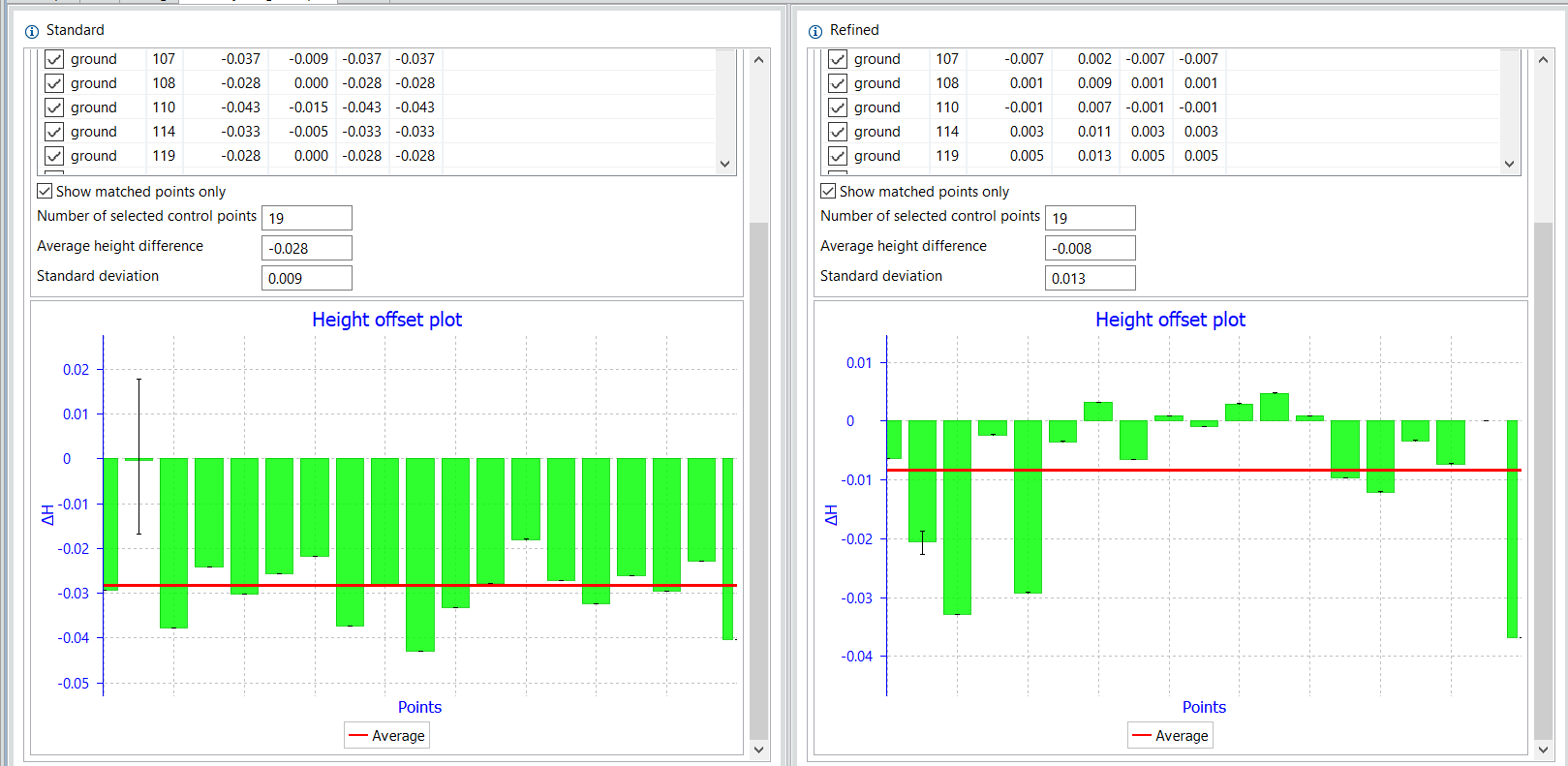
利用控制目標進行精度評估
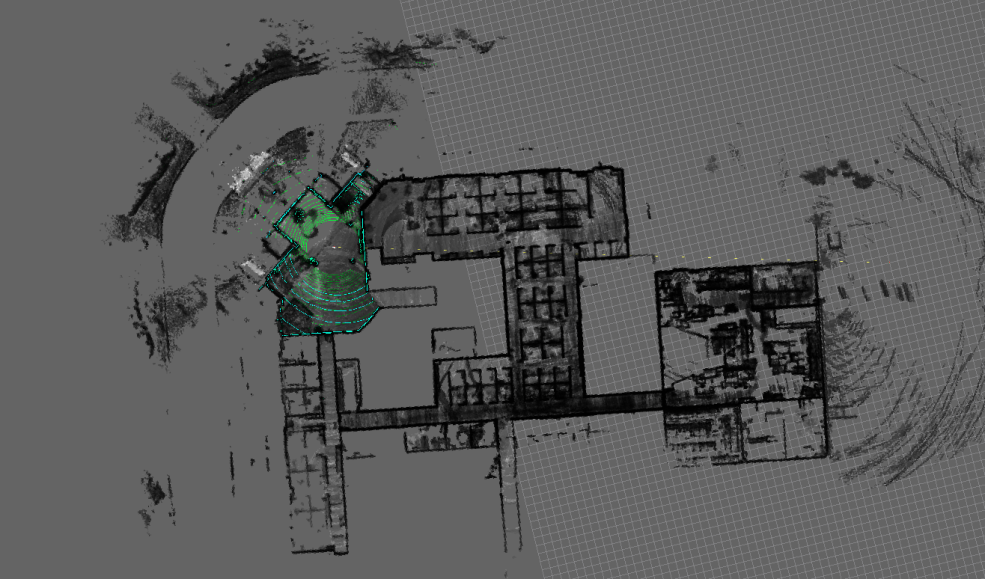
即時定位與地圖建構-SLAM技術
Simultaneous Localization and Mapping, 即時定位與地圖建圖。
SLAM問題可以描述為:機器人在未知環境中從一個未知位置開始移動,在移動過程中根據位置估計和地圖進行自身定位,同時在自身定位的基礎上建造增量式地圖,實現機器人的自主定位和導航。
SLAM計算方式:
- 地圖建構:掃描與子映射坐標系重複校正對準的反覆運算。
- 姿態優化:所有完成的子映射和掃描都會自動考慮迴圈閉合(迴圈閉合的掃描匹配)
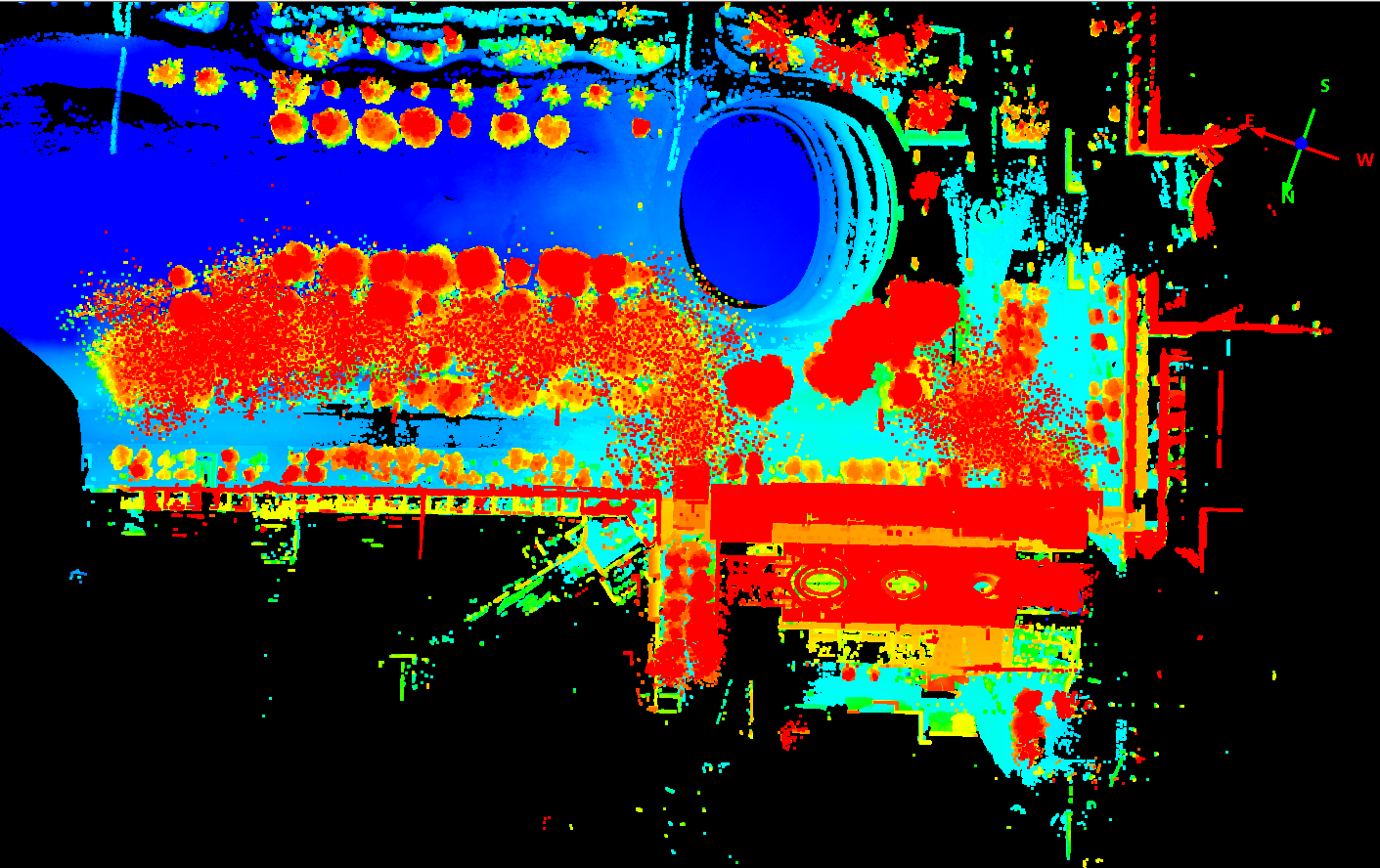
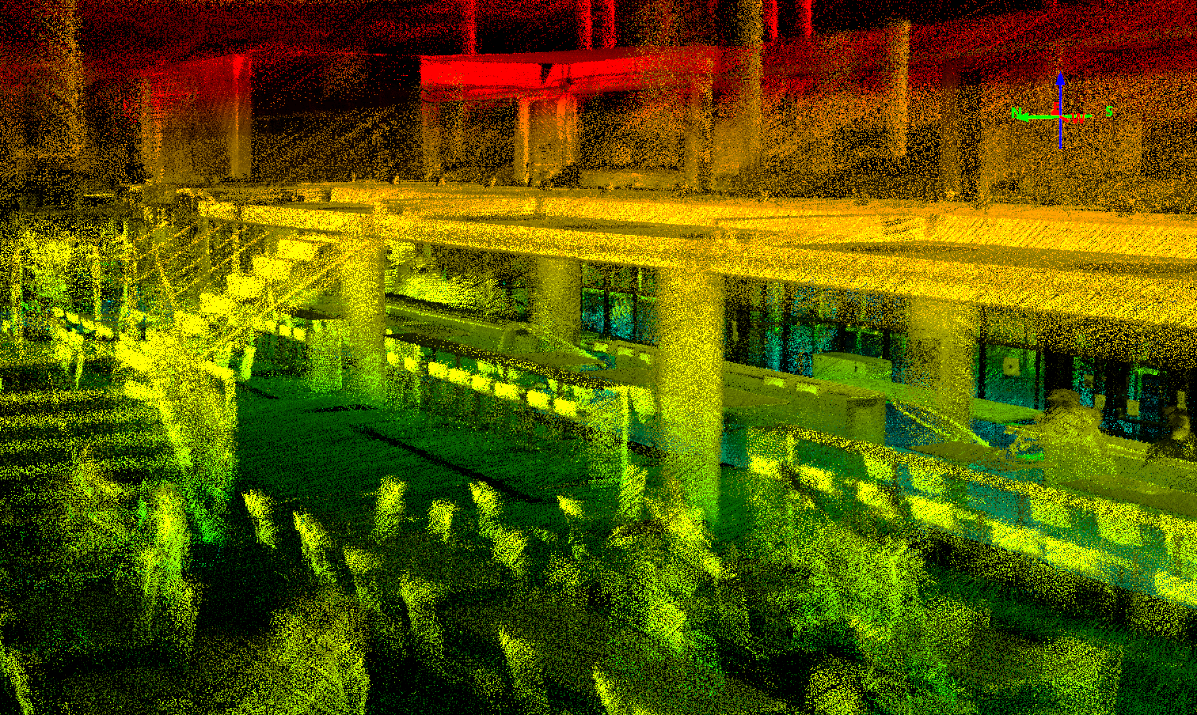
戶外掃描結合室內掃描成果
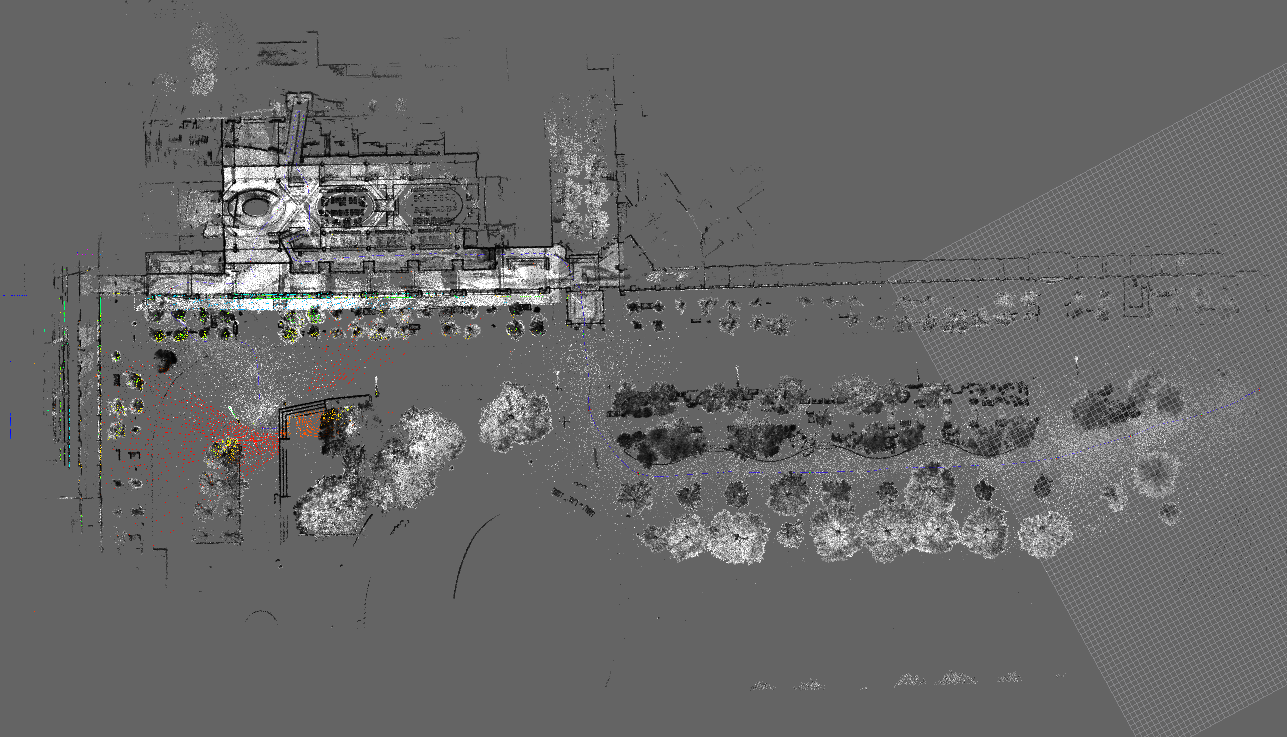
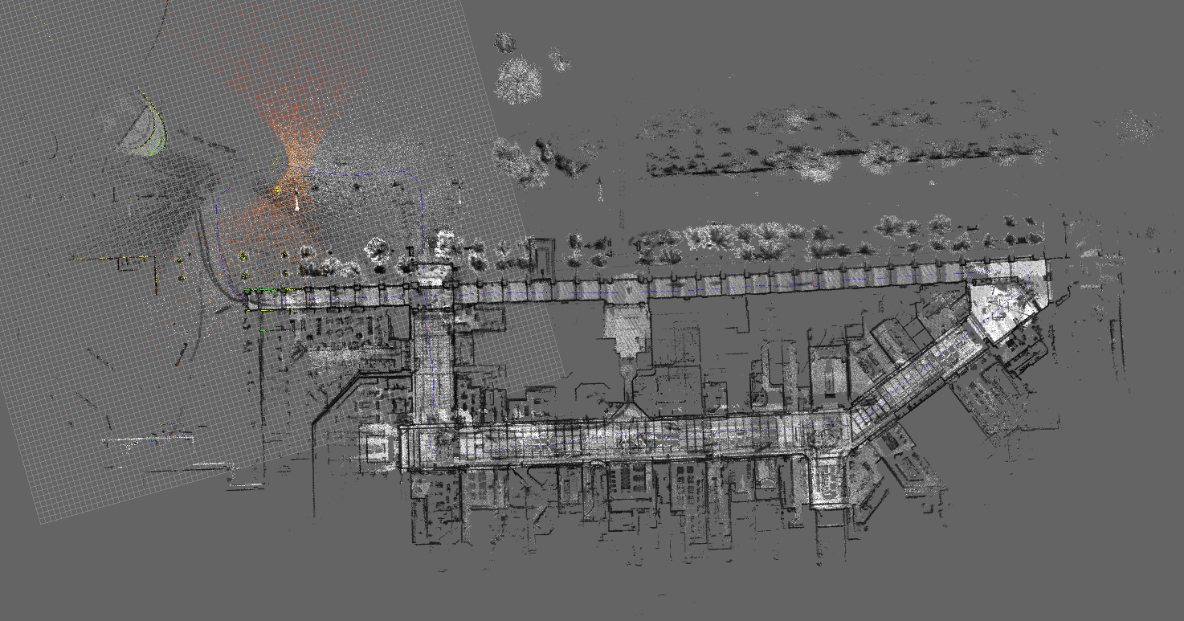
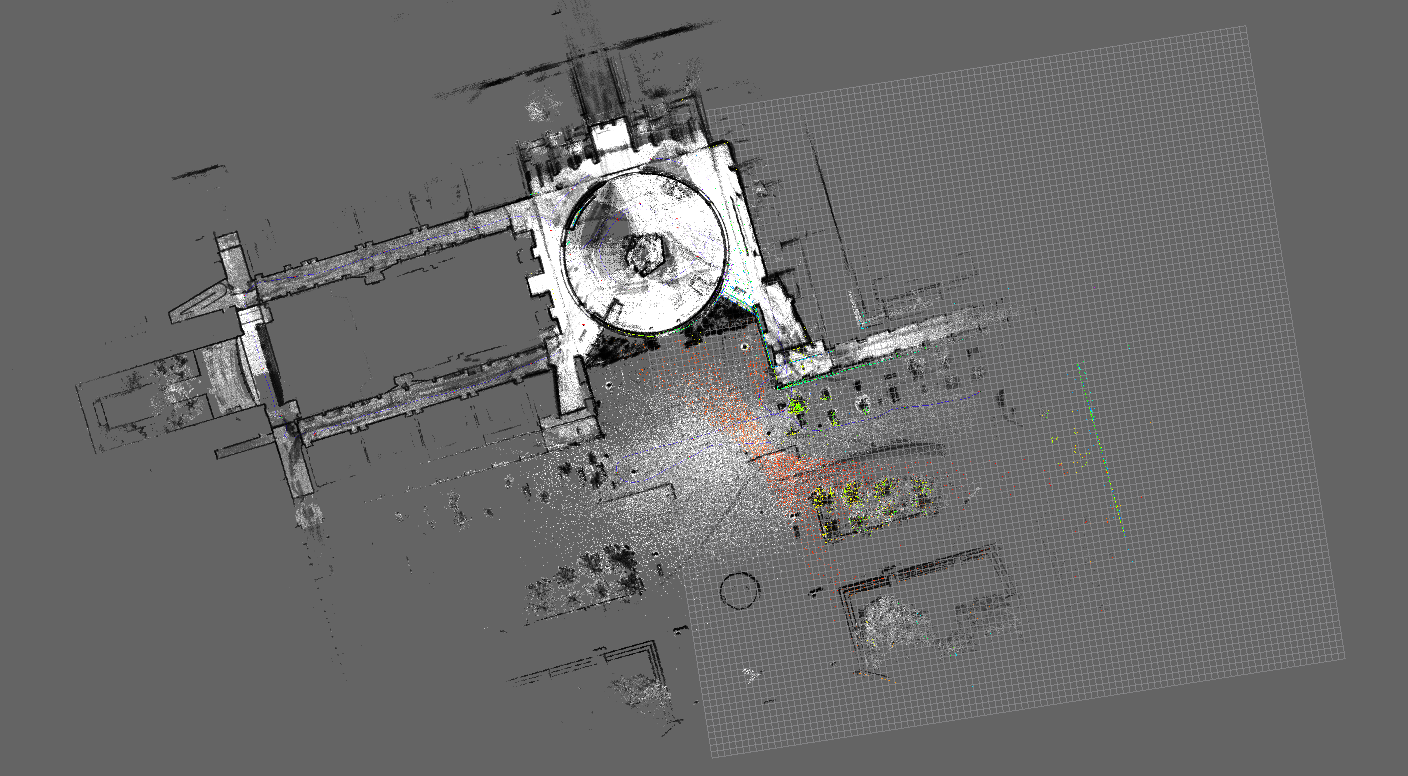
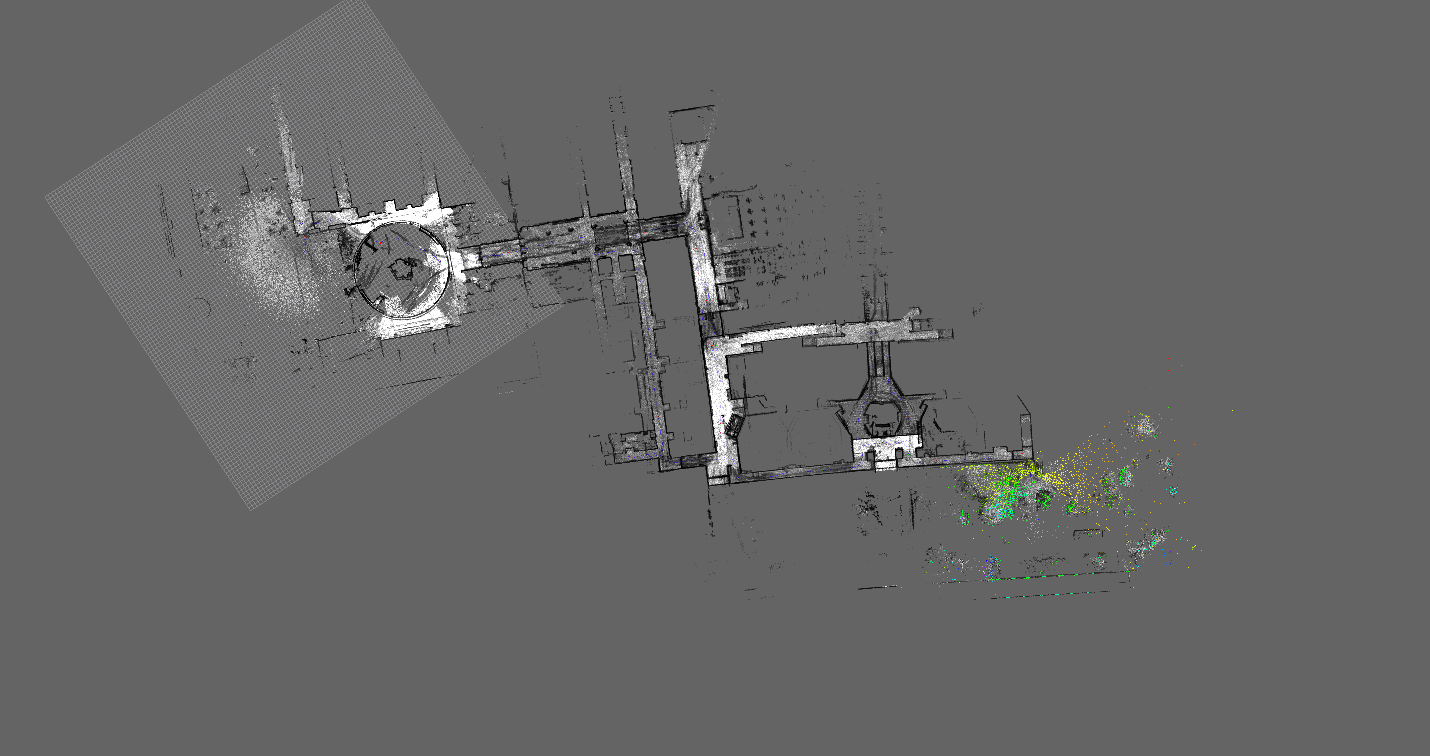
密集點雲