
現況點雲掃描比對 BIM 模型實現『依模施工』
利用 Hovermap 揭示差異,現況掃描與既有 BIM 模型的比對分析
在建築和工程領域,準確分析現場實際狀況與既有 BIM(建築資訊模型)之間的差異非常重要,能夠在建築項目中發現潛在問題,並採取適當解決措施決,從而提高工程品質及效率。
解決方案
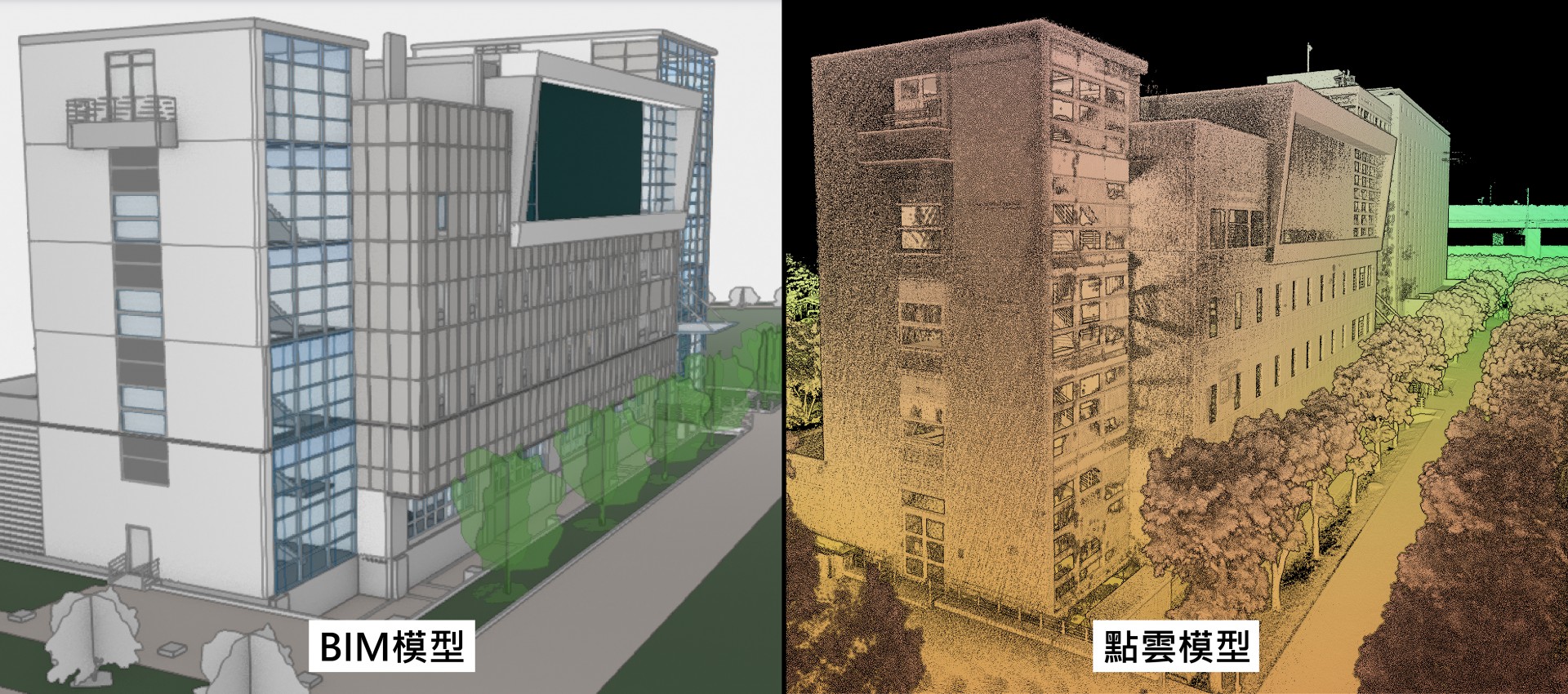
透過 Hovermap 自主測繪系統搭載無人機高精度掃描技術,能快速、自動化地捕捉並建立室內、室外環境的實際 3D 點雲模型,後續還能將掃描成果與既有 BIM 模型進行吻合度比對,以發現任何差異與不一致之處。
●提高準確性:Hovermap 達公分級測繪精度,能夠快速掃描環境的點雲模型。
●節省時間與成本:傳統的手動測量工作需要大量的人力和時間,而點雲掃描可以快速、自動化地完成測量任務。
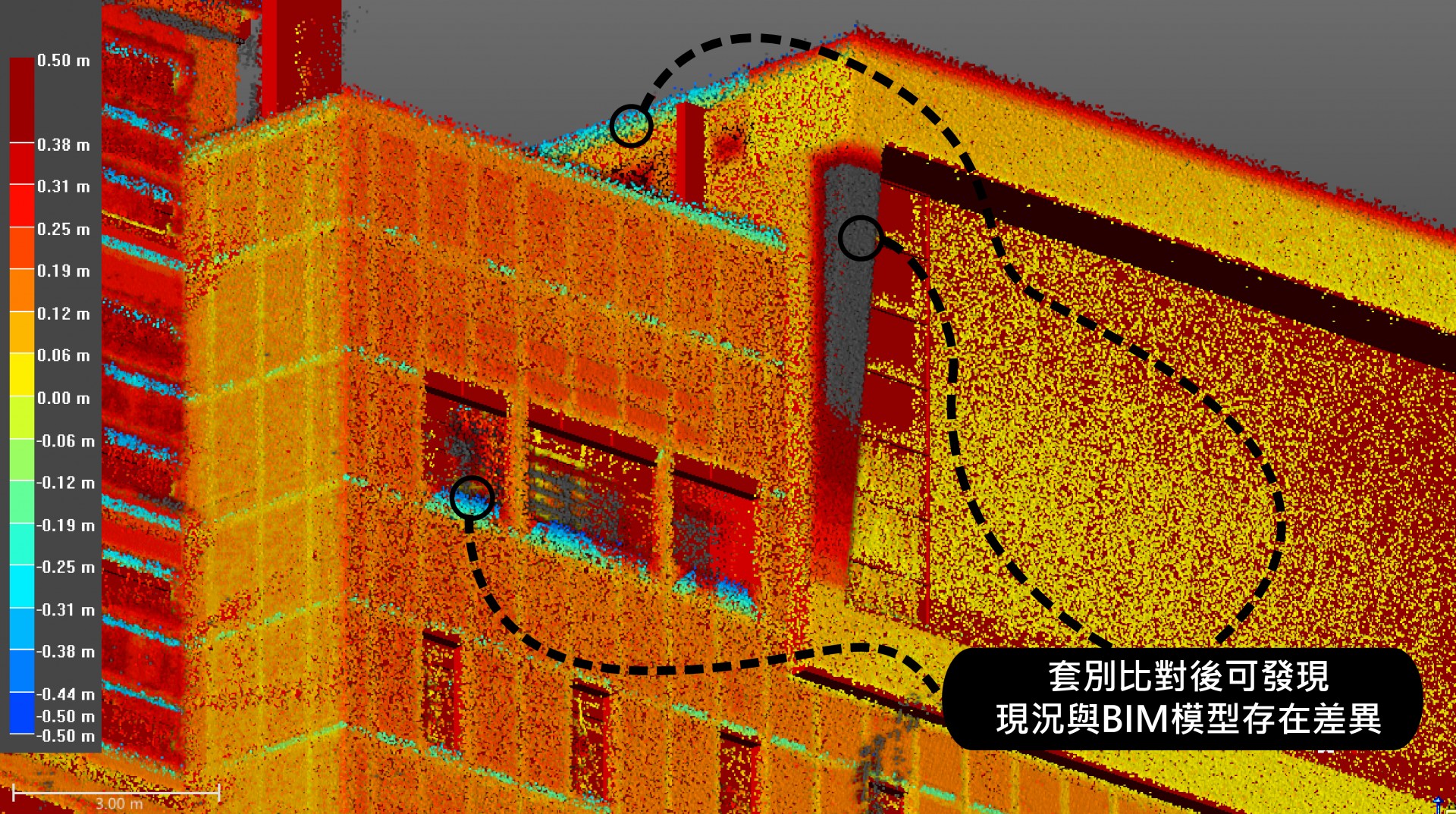
●提前發現問題:通過將現場實際狀況與 BIM 模型進行比對,可以在早期階段發現任何差異,這使得在建築專案中可以提前發現潛在的問題,並及時採取適當的措施來解決。
應用情境
Hovermap 掃描後導入 Realworks 比對 BIM 模型分析檢測差異。
實際範例
2023 年 6 月中翰團隊利用 Realworks 點雲後處理軟體,使用 Hovermap 掃描內政部建築研究所材料實驗中心,取得現況點雲與原始的 BIM 模型進行比對,精密計算每顆點雲與模型表面距離,準確檢測出兩者之間差異,如結構偏差、尺寸不符、設計與實際施工的不一致等。
應用產品
●Trimble X7 採用先進技術讓掃描操作更簡單,並大幅度提升作業效率,在專用軟體 Trimble FieldLink 的支援下,使用者可以在掃描完成的當下即時進行自動點雲拼接,這將顯著減少資料後處理的時間與返回現場補測的機率,除此之外,X7 還具有自動定平、自動校準等功能,克服了傳統地面雷射掃描技術的缺陷。
●Emesent Hovermap 是新一代高智能的 SLAM LiDAR 測繪系統,它利用專利的搭載基座,可快速靈活地在無人機、手持、背包或車輛間進行佈署切換,衍生出業界之最。當搭載在無人機上執行掃描任務時,便成為世界上最強大的自主飛行自動測繪系統,能夠在無 GPS、無 WIFI、無行動網路訊號、無人可到達的地點,如同掃地機器人般,自動獲得完整無死角的彩色點雲資料。使用 Hovermap 系統,將會感受到史無前例的革命性絕佳掃描體驗。