解開『空間迷向』之謎
用點雲模擬真實環境的空間尋路實驗
點雲竟然還能這樣玩?應用在人類行為研究的空間模擬情境!
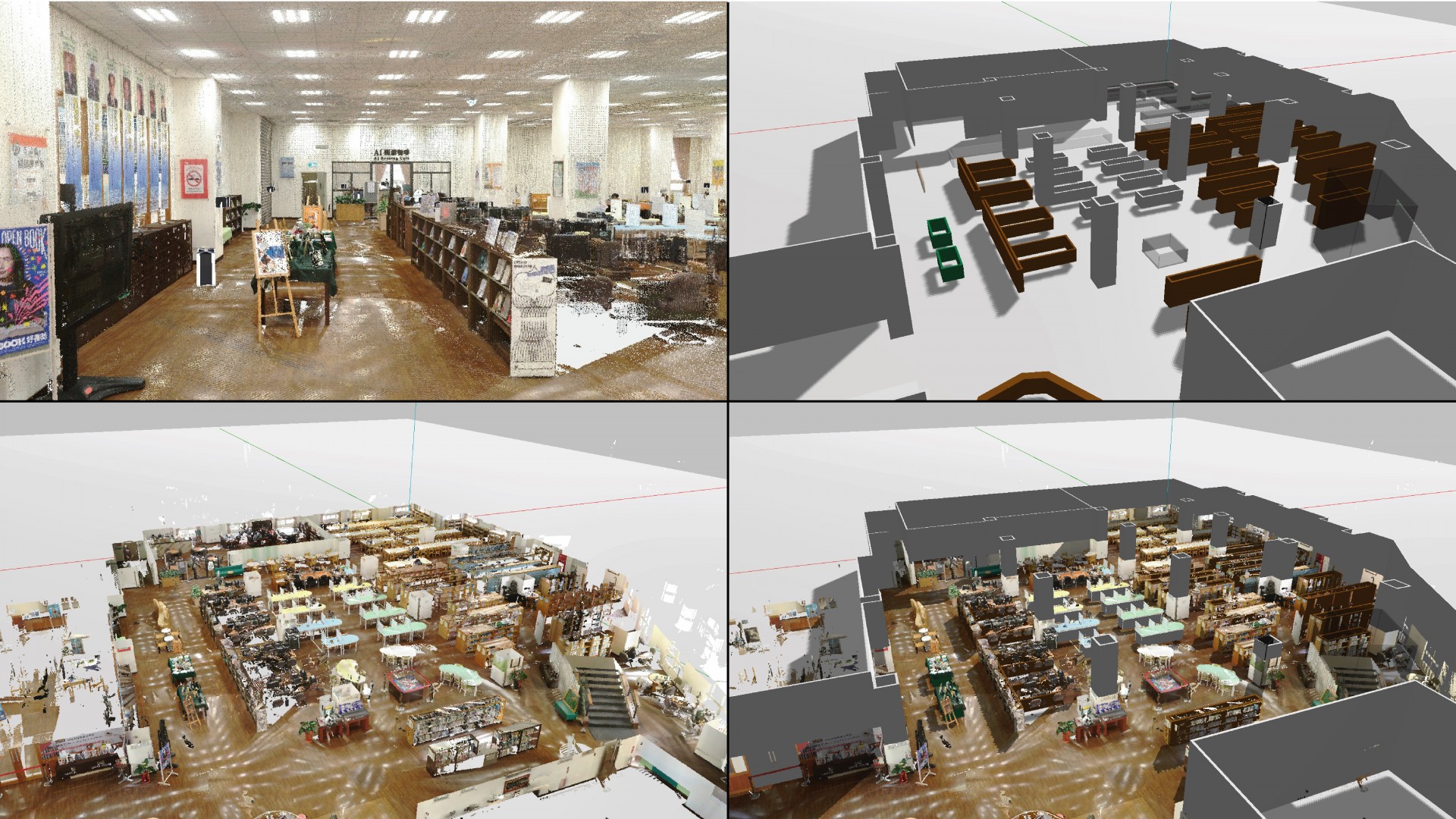
使用 Trimble X7 或 Hovermap 可以輕易地將真實世界的空間資訊,掃描成彩色點雲(Pointcloud)模型,這在環境實驗模擬中特別方便,情境模擬、人流模擬、展場活動設計...等都可見其應用,近年來開始有學者利用點雲技術掃描台灣易發生災害的大型公共場域,搭配 VR 技術,讓受測者身歷其境的在設計好的空間中進行各種實驗模擬。
產品優勢
●快速採集空間數據
使用點雲掃描可以快速地將真實世界的空間視覺效果虛擬化,在虛擬的VR世界中再現真實環境。
●多種情境應用
將點雲模型進行後製,可以在其中佈置火焰、煙霧、障礙物、牆體,甚至是不同天氣與光影。
●方便測試空間差異
透過模擬各種不同的空間格局情境,輕易比較不同方案的設計規劃效果。
應用情境
將點雲模型進行後製,可以在模型中設置牆體與障礙物,通常我們很難在真實世界中直接進行實驗,但若是把真實世界掃描下來,透過點雲與 VR 技術,不但能快速地進行大量實測,更能使用任何地方作為模擬場地。

實際範例
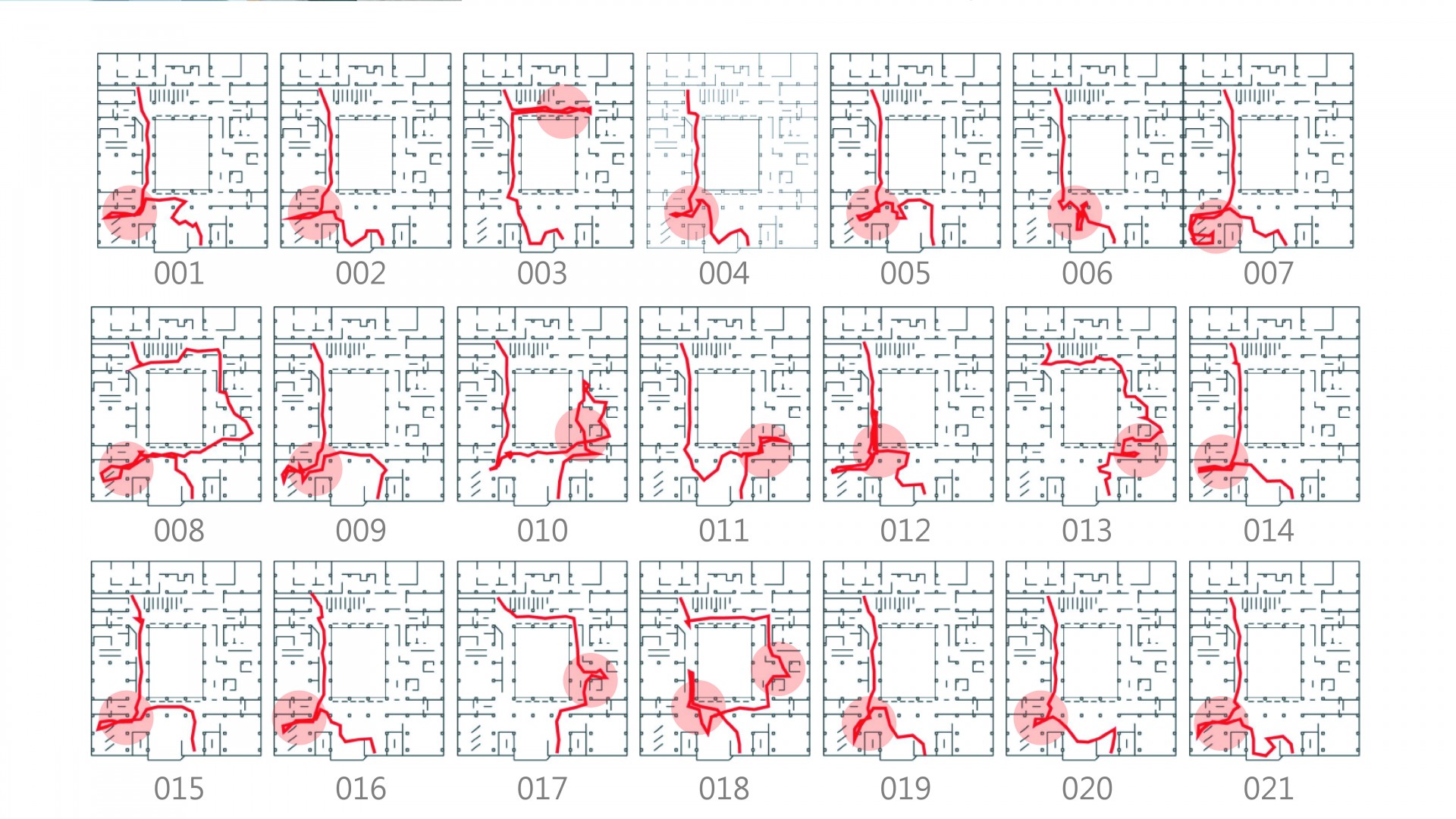
在 2022 年的一項人類行為研究中,學者就利用了點雲與 VR 技術,模擬易發生重大災害的空間進行實驗,並建置「災害前」空間資料庫,最終發現了易發生空間迷向(Spatial Disorientation)的關鍵地點特徵,提供給學術界、消防單位以及空間設計的各專業人員做後續規劃參考,降低危急情況下空間迷向現象的發生機率。
應用產品
•Trimble X7 採用先進技術讓掃描操作更簡單,並大幅度提升作業效率,在專用軟體 Trimble FieldLink 的支援下,使用者可以在掃描完成的當下即時進行自動點雲拼接,這將顯著減少資料後處理的時間與返回現場補測的機率,除此之外,X7 還具有自動定平、自動校準等功能,克服了傳統地面雷射掃描技術的缺陷。
•Emesent Hovermap 是新一代高智能的 SLAM LiDAR 測繪系統,它利用專利的搭載基座,可快速靈活地在無人機、手持、背包或車輛間進行佈署切換,衍生出業界之最。當搭載在無人機上執行掃描任務時,便成為世界上最強大的自主飛行自動測繪系統,能夠在無 GPS、無 WIFI、無行動網路訊號、無人可到達的地點,如同掃地機器人般,自動獲得完整無死角的彩色點雲資料。使用 Hovermap 系統,您將會感受到史無前例的革命性絕佳掃描體驗。